![]()

Tutorial 3: Learning to Act: Q-Learning#
Week 3, Day 4: Reinforcement Learning
By Neuromatch Academy
Content creators: Marcelo G Mattar, Eric DeWitt, Matt Krause, Matthew Sargent, Anoop Kulkarni, Sowmya Parthiban, Feryal Behbahani, Jane Wang
Content reviewers: Ella Batty, Byron Galbraith, Michael Waskom, Ezekiel Williams, Mehul Rastogi, Lily Cheng, Roberto Guidotti, Arush Tagade, Kelson Shilling-Scrivo
Tutorial Objectives#
Estimated timing of tutorial: 40 min
In this tutorial we will model slightly more complex acting agents whose actions affect not only which rewards are received immediately (as in Tutorial 2), but also the state of the world itself – and, in turn, the likelihood of receiving rewards in the future. As such, these agents must leverage the predictions of future reward from Tutorial 1 to figure out how to trade-off instantaneous rewards with the potential of even higher rewards in the future.
You will learn how to act in the more realistic setting of sequential decisions, formalized by Markov Decision Processes (MDPs). In a sequential decision problem, the actions executed in one state not only may lead to immediate rewards (as in a bandit problem), but may also affect the states experienced next (unlike a bandit problem). Each individual action may therefore affect all future rewards. Thus, making decisions in this setting requires considering each action in terms of their expected cumulative future reward.
We will consider here the example of spatial navigation, where actions (movements) in one state (location) affect the states experienced next, and an agent might need to execute a whole sequence of actions before a reward is obtained.
By the end of this tutorial, you will learn
what grid worlds are and how they help in evaluating simple reinforcement learning agents
the basics of the Q-learning algorithm for estimating action values
how the concept of exploration and exploitation, reviewed in the bandit case, also applies to the sequential decision setting
Setup#
Install and import feedback gadget#
Show code cell source
# @title Install and import feedback gadget
!pip3 install vibecheck datatops --quiet
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch_cn",
"user_key": "y1x3mpx5",
},
).render()
feedback_prefix = "W3D4_T3"
# Imports
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import convolve as conv
Figure Settings#
Show code cell source
# @title Figure Settings
import logging
logging.getLogger('matplotlib.font_manager').disabled = True
%config InlineBackend.figure_format = 'retina'
plt.style.use("https://raw.githubusercontent.com/NeuromatchAcademy/course-content/main/nma.mplstyle")
Plotting Functions#
Show code cell source
# @title Plotting Functions
def plot_state_action_values(env, value, ax=None, show=False):
"""
Generate plot showing value of each action at each state.
"""
if ax is None:
fig, ax = plt.subplots()
for a in range(env.n_actions):
ax.plot(range(env.n_states), value[:, a], marker='o', linestyle='--')
ax.set(xlabel='States', ylabel='Values')
ax.legend(['R','U','L','D'], loc='lower right')
if show:
plt.show()
def plot_quiver_max_action(env, value, ax=None, show=False):
"""
Generate plot showing action of maximum value or maximum probability at
each state (not for n-armed bandit or cheese_world).
"""
if ax is None:
fig, ax = plt.subplots()
X = np.tile(np.arange(env.dim_x), [env.dim_y,1]) + 0.5
Y = np.tile(np.arange(env.dim_y)[::-1][:,np.newaxis], [1,env.dim_x]) + 0.5
which_max = np.reshape(value.argmax(axis=1), (env.dim_y,env.dim_x))
which_max = which_max[::-1,:]
U = np.zeros(X.shape)
V = np.zeros(X.shape)
U[which_max == 0] = 1
V[which_max == 1] = 1
U[which_max == 2] = -1
V[which_max == 3] = -1
ax.quiver(X, Y, U, V)
ax.set(
title='Maximum value/probability actions',
xlim=[-0.5, env.dim_x+0.5],
ylim=[-0.5, env.dim_y+0.5],
)
ax.set_xticks(np.linspace(0.5, env.dim_x-0.5, num=env.dim_x))
ax.set_xticklabels(["%d" % x for x in np.arange(env.dim_x)])
ax.set_xticks(np.arange(env.dim_x+1), minor=True)
ax.set_yticks(np.linspace(0.5, env.dim_y-0.5, num=env.dim_y))
ax.set_yticklabels(["%d" % y for y in np.arange(0, env.dim_y*env.dim_x,
env.dim_x)])
ax.set_yticks(np.arange(env.dim_y+1), minor=True)
ax.grid(which='minor',linestyle='-')
if show:
plt.show()
def plot_heatmap_max_val(env, value, ax=None, show=False):
"""
Generate heatmap showing maximum value at each state
"""
if ax is None:
fig, ax = plt.subplots()
if value.ndim == 1:
value_max = np.reshape(value, (env.dim_y,env.dim_x))
else:
value_max = np.reshape(value.max(axis=1), (env.dim_y,env.dim_x))
value_max = value_max[::-1, :]
im = ax.imshow(value_max, aspect='auto', interpolation='none', cmap='afmhot')
ax.set(title='Maximum value per state')
ax.set_xticks(np.linspace(0, env.dim_x-1, num=env.dim_x))
ax.set_xticklabels(["%d" % x for x in np.arange(env.dim_x)])
ax.set_yticks(np.linspace(0, env.dim_y-1, num=env.dim_y))
if env.name != 'windy_cliff_grid':
ax.set_yticklabels(["%d" % y for y in np.arange(0, env.dim_y*env.dim_x, env.dim_x)][::-1])
if show:
plt.show()
return im
def plot_rewards(n_episodes, rewards, average_range=10, ax=None, show=False):
"""
Generate plot showing total reward accumulated in each episode.
"""
if ax is None:
fig, ax = plt.subplots()
smoothed_rewards = (conv(rewards, np.ones(average_range), mode='same')
/ average_range)
ax.plot(range(0, n_episodes, average_range),
smoothed_rewards[0:n_episodes:average_range],
marker='o', linestyle='--')
ax.set(xlabel='Episodes', ylabel='Total reward')
if show:
plt.show()
def plot_performance(env, value, reward_sums):
fig, axes = plt.subplots(nrows=2, ncols=2, figsize=(16, 12))
plot_state_action_values(env, value, ax=axes[0, 0])
plot_quiver_max_action(env, value, ax=axes[0, 1])
plot_rewards(n_episodes, reward_sums, ax=axes[1, 0])
im = plot_heatmap_max_val(env, value, ax=axes[1, 1])
fig.colorbar(im)
plt.show(fig)
Section 1: Markov Decision Processes#
Video 1: MDPs and Q-learning#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_MDPs_and_Q_learning_Video")
Grid Worlds
As pointed out, bandits only have a single state and immediate rewards for our actions. Many problems we are interested in have multiple states and delayed rewards, i.e. we won’t know if the choices we made will pay off over time, or which actions we took contributed to the outcomes we observed.
In order to explore these ideas, we turn to the common problem setting: the grid world. Grid worlds are simple environments where each state corresponds to a tile on a 2D grid, and the only actions the agent can take are to move up, down, left, or right across the grid tiles. The agent’s job is almost always to find a way to a goal tile in the most direct way possible while overcoming some maze or other obstacles, either static or dynamic.
For our discussion we will be looking at the classic Cliff World, or Cliff Walker, environment. This is a 4x10 grid with a starting position in the lower-left and the goal position in the lower-right. Every tile between these two is the “cliff”, and should the agent enter the cliff, they will receive a -100 reward and be sent back to the starting position. Every tile other than the cliff produces a -1 reward when entered. The goal tile ends the episode after taking any action from it.
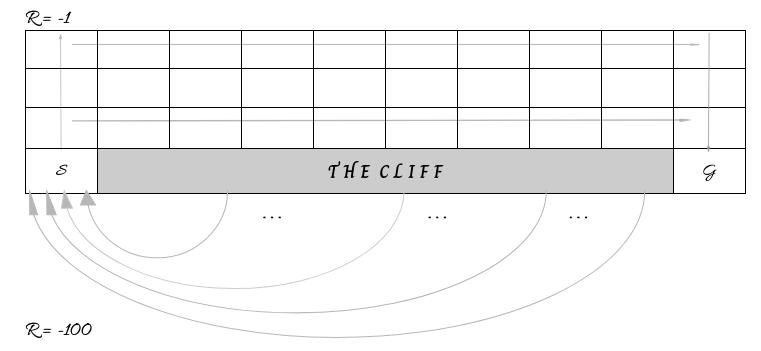
Given these conditions, the maximum achievable reward is -11 (1 up, 9 right, 1 down). Using negative rewards is a common technique to encourage the agent to move and seek out the goal state as fast as possible.
Section 2: Q-Learning#
Estimated timing to here from start of tutorial: 20 min
Now that we have our environment, how can we solve it?
One of the most famous algorithms for estimating action values (aka Q-values) is the Temporal Differences (TD) control algorithm known as Q-learning (Watkins, 1989).
where \(Q(s,a)\) is the value function for action \(a\) at state \(s\), \(\alpha\) is the learning rate, \(r\) is the reward, and \(\gamma\) is the temporal discount rate.
The expression \(r_t + \gamma\max_\limits{a} Q(s_{t+1},a_{t+1})\) is referred to as the TD target while the full expression
i.e., the difference between the TD target and the current Q-value, is referred to as the TD error, or reward prediction error.
Because of the max operator used to select the optimal Q-value in the TD target, Q-learning directly estimates the optimal action value, i.e. the cumulative future reward that would be obtained if the agent behaved optimally, regardless of the policy currently followed by the agent. For this reason, Q-learning is referred to as an off-policy method.
Coding Exercise 2: Implement the Q-learning algorithm#
In this exercise you will implement the Q-learning update rule described above. It takes in as arguments the previous state \(s_t\), the action \(a_t\) taken, the reward received \(r_t\), the current state \(s_{t+1}\), the Q-value table, and a dictionary of parameters that contain the learning rate \(\alpha\) and discount factor \(\gamma\). The method returns the updated Q-value table. For the parameter dictionary, \(\alpha\): params['alpha'] and \(\gamma\): params['gamma'].
Once we have our Q-learning algorithm, we will see how it handles learning to solve the Cliff World environment.
You will recall from the previous tutorial that a major part of reinforcement learning algorithms are their ability to balance exploitation and exploration. For our Q-learning agent, we again turn to the epsilon-greedy strategy. At each step, the agent will decide with probability \(1 - \epsilon\) to use the best action for the state it is currently in by looking at the value function, otherwise just make a random choice.
The process by which our agent will interact with and learn about the environment is handled for you in the helper function learn_environment. This implements the entire learning episode lifecycle of stepping through the state observation, action selection (epsilon-greedy) and execution, reward, and state transition. Feel free to review that code later to see how it all fits together, but for now let’s test out our agent.
Execute to get helper functions epsilon_greedy, CliffWorld, and learn_environment
Show code cell source
# @markdown Execute to get helper functions `epsilon_greedy`, `CliffWorld`, and `learn_environment`
def epsilon_greedy(q, epsilon):
"""Epsilon-greedy policy: selects the maximum value action with probability
(1-epsilon) and selects randomly with epsilon probability.
Args:
q (ndarray): an array of action values
epsilon (float): probability of selecting an action randomly
Returns:
int: the chosen action
"""
if np.random.random() > epsilon:
action = np.argmax(q)
else:
action = np.random.choice(len(q))
return action
class CliffWorld:
"""
World: Cliff world.
40 states (4-by-10 grid world).
The mapping from state to the grids are as follows:
30 31 32 ... 39
20 21 22 ... 29
10 11 12 ... 19
0 1 2 ... 9
0 is the starting state (S) and 9 is the goal state (G).
Actions 0, 1, 2, 3 correspond to right, up, left, down.
Moving anywhere from state 9 (goal state) will end the session.
Taking action down at state 11-18 will go back to state 0 and incur a
reward of -100.
Landing in any states other than the goal state will incur a reward of -1.
Going towards the border when already at the border will stay in the same
place.
"""
def __init__(self):
self.name = "cliff_world"
self.n_states = 40
self.n_actions = 4
self.dim_x = 10
self.dim_y = 4
self.init_state = 0
def get_outcome(self, state, action):
if state == 9: # goal state
reward = 0
next_state = None
return next_state, reward
reward = -1 # default reward value
if action == 0: # move right
next_state = state + 1
if state % 10 == 9: # right border
next_state = state
elif state == 0: # start state (next state is cliff)
next_state = None
reward = -100
elif action == 1: # move up
next_state = state + 10
if state >= 30: # top border
next_state = state
elif action == 2: # move left
next_state = state - 1
if state % 10 == 0: # left border
next_state = state
elif action == 3: # move down
next_state = state - 10
if state >= 11 and state <= 18: # next is cliff
next_state = None
reward = -100
elif state <= 9: # bottom border
next_state = state
else:
print("Action must be between 0 and 3.")
next_state = None
reward = None
return int(next_state) if next_state is not None else None, reward
def get_all_outcomes(self):
outcomes = {}
for state in range(self.n_states):
for action in range(self.n_actions):
next_state, reward = self.get_outcome(state, action)
outcomes[state, action] = [(1, next_state, reward)]
return outcomes
def learn_environment(env, learning_rule, params, max_steps, n_episodes):
# Start with a uniform value function
value = np.ones((env.n_states, env.n_actions))
# Run learning
reward_sums = np.zeros(n_episodes)
# Loop over episodes
for episode in range(n_episodes):
state = env.init_state # initialize state
reward_sum = 0
for t in range(max_steps):
# choose next action
action = epsilon_greedy(value[state], params['epsilon'])
# observe outcome of action on environment
next_state, reward = env.get_outcome(state, action)
# update value function
value = learning_rule(state, action, reward, next_state, value, params)
# sum rewards obtained
reward_sum += reward
if next_state is None:
break # episode ends
state = next_state
reward_sums[episode] = reward_sum
return value, reward_sums
def q_learning(state, action, reward, next_state, value, params):
"""Q-learning: updates the value function and returns it.
Args:
state (int): the current state identifier
action (int): the action taken
reward (float): the reward received
next_state (int): the transitioned to state identifier
value (ndarray): current value function of shape (n_states, n_actions)
params (dict): a dictionary containing the default parameters
Returns:
ndarray: the updated value function of shape (n_states, n_actions)
"""
# Q-value of current state-action pair
q = value[state, action]
##########################################################
## TODO for students: implement the Q-learning update rule
# Fill out function and remove
raise NotImplementedError("Student exercise: implement the Q-learning update rule")
##########################################################
# write an expression for finding the maximum Q-value at the current state
if next_state is None:
max_next_q = 0
else:
max_next_q = ...
# write the expression to compute the TD error
td_error = ...
# write the expression that updates the Q-value for the state-action pair
value[state, action] = ...
return value
# set for reproducibility, comment out / change seed value for different results
np.random.seed(1)
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.1, # epsilon-greedy policy
'alpha': 0.1, # learning rate
'gamma': 1.0, # discount factor
}
# episodes/trials
n_episodes = 500
max_steps = 1000
# environment initialization
env = CliffWorld()
# solve Cliff World using Q-learning
results = learn_environment(env, q_learning, params, max_steps, n_episodes)
value_qlearning, reward_sums_qlearning = results
# Plot results
plot_performance(env, value_qlearning, reward_sums_qlearning)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_Q_learning_algorithm_Exercise")
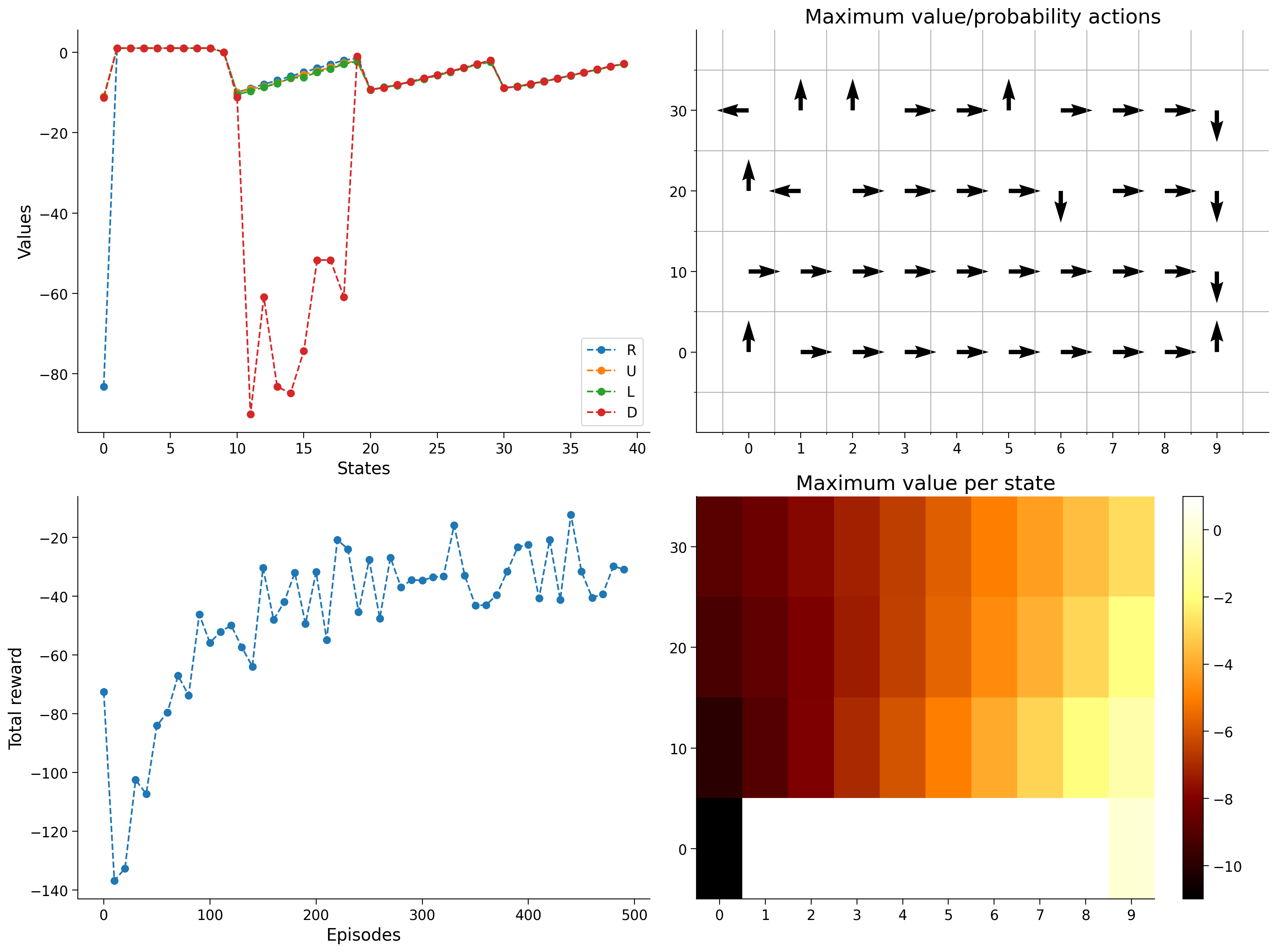
If all went well, we should see four plots that show different aspects of our agent’s learning and progress.
The top left is a representation of the Q-table itself, showing the values for different actions in different states. Notably, going right from the starting state or down when above the cliff is clearly very bad.
The top right figure shows the greedy policy based on the Q-table, i.e. what action would the agent take if it only took its best guess in that state.
The bottom right is the same as the top, only instead of showing the action, it’s showing a representation of the maximum Q-value at a particular state.
The bottom left is the actual proof of learning, as we see the total reward steadily increasing after each episode until asymptoting at the maximum possible reward of -11.
Feel free to try changing the parameters or random seed and see how the agent’s behavior changes.
Summary#
Estimated timing of tutorial: 40 min
In this tutorial you implemented a reinforcement learning agent based on Q-learning to solve the Cliff World environment. Q-learning combined the epsilon-greedy approach to exploration-exploitation with a table-based value function to learn the expected future rewards for each state.
Bonus Section 1: SARSA#
An alternative to Q-learning, the SARSA algorithm also estimates action values. However, rather than estimating the optimal (off-policy) values, SARSA estimates the on-policy action value, i.e. the cumulative future reward that would be obtained if the agent behaved according to its current beliefs.
where, once again, \(Q(s,a)\) is the value function for action \(a\) at state \(s\), \(\alpha\) is the learning rate, \(r\) is the reward, and \(\gamma\) is the temporal discount rate.
In fact, you will notice that the only difference between Q-learning and SARSA is the TD target calculation uses the policy to select the next action (in our case epsilon-greedy) rather than using the action that maximizes the Q-value.
Bonus Coding Exercise 1: Implement the SARSA algorithm#
In this exercise you will implement the SARSA update rule described above. Just like Q-learning, it takes in as arguments the previous state \(s_t\), the action \(a_t\) taken, the reward received \(r_t\), the current state \(s_{t+1}\), the Q-value table, and a dictionary of parameters that contain the learning rate \(\alpha\) and discount factor \(\gamma\). The method returns the updated Q-value table. You may use the epsilon_greedy function to acquire the next action. For the parameter dictionary, \(\alpha\): params['alpha'], \(\gamma\): params['gamma'], and \(\epsilon\): params['epsilon'].
Once we have an implementation for SARSA, we will see how it tackles Cliff World. We will again use the same setup we tried with Q-learning.
def sarsa(state, action, reward, next_state, value, params):
"""SARSA: updates the value function and returns it.
Args:
state (int): the current state identifier
action (int): the action taken
reward (float): the reward received
next_state (int): the transitioned to state identifier
value (ndarray): current value function of shape (n_states, n_actions)
params (dict): a dictionary containing the default parameters
Returns:
ndarray: the updated value function of shape (n_states, n_actions)
"""
# value of previous state-action pair
q = value[state, action]
##########################################################
## TODO for students: implement the SARSA update rule
# Fill out function and remove
raise NotImplementedError("Student exercise: implement the SARSA update rule")
##########################################################
# select the expected value at current state based on our policy by sampling
# from it
if next_state is None:
policy_next_q = 0
else:
# write an expression for selecting an action using epsilon-greedy
policy_action = ...
# write an expression for obtaining the value of the policy action at the
# current state
policy_next_q = ...
# write the expression to compute the TD error
td_error = ...
# write the expression that updates the Q-value for the state-action pair
value[state, action] = ...
return value
# set for reproducibility, comment out / change seed value for different results
np.random.seed(1)
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.1, # epsilon-greedy policy
'alpha': 0.1, # learning rate
'gamma': 1.0, # discount factor
}
# episodes/trials
n_episodes = 500
max_steps = 1000
# environment initialization
env = CliffWorld()
# learn Cliff World using Sarsa -- uncomment to check your solution!
results = learn_environment(env, sarsa, params, max_steps, n_episodes)
value_sarsa, reward_sums_sarsa = results
# Plot results
plot_performance(env, value_sarsa, reward_sums_sarsa)
def sarsa(state, action, reward, next_state, value, params):
"""SARSA: updates the value function and returns it.
Args:
state (int): the current state identifier
action (int): the action taken
reward (float): the reward received
next_state (int): the transitioned to state identifier
value (ndarray): current value function of shape (n_states, n_actions)
params (dict): a dictionary containing the default parameters
Returns:
ndarray: the updated value function of shape (n_states, n_actions)
"""
# value of previous state-action pair
q = value[state, action]
# select the expected value at current state based on our policy by sampling
# from it
if next_state is None:
policy_next_q = 0
else:
# write an expression for selecting an action using epsilon-greedy
policy_action = epsilon_greedy(value[next_state], params['epsilon'])
# write an expression for obtaining the value of the policy action at the
# current state
policy_next_q = value[next_state, policy_action]
# write the expression to compute the TD error
td_error = reward + params['gamma'] * policy_next_q - q
# write the expression that updates the Q-value for the state-action pair
value[state, action] = q + params['alpha'] * td_error
return value
# set for reproducibility, comment out / change seed value for different results
np.random.seed(1)
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.1, # epsilon-greedy policy
'alpha': 0.1, # learning rate
'gamma': 1.0, # discount factor
}
# episodes/trials
n_episodes = 500
max_steps = 1000
# environment initialization
env = CliffWorld()
# learn Cliff World using Sarsa -- uncomment to check your solution!
results = learn_environment(env, sarsa, params, max_steps, n_episodes)
value_sarsa, reward_sums_sarsa = results
# Plot results
with plt.xkcd():
plot_performance(env, value_sarsa, reward_sums_sarsa)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_the_SARSA_algorithm_Bonus_Exercise")
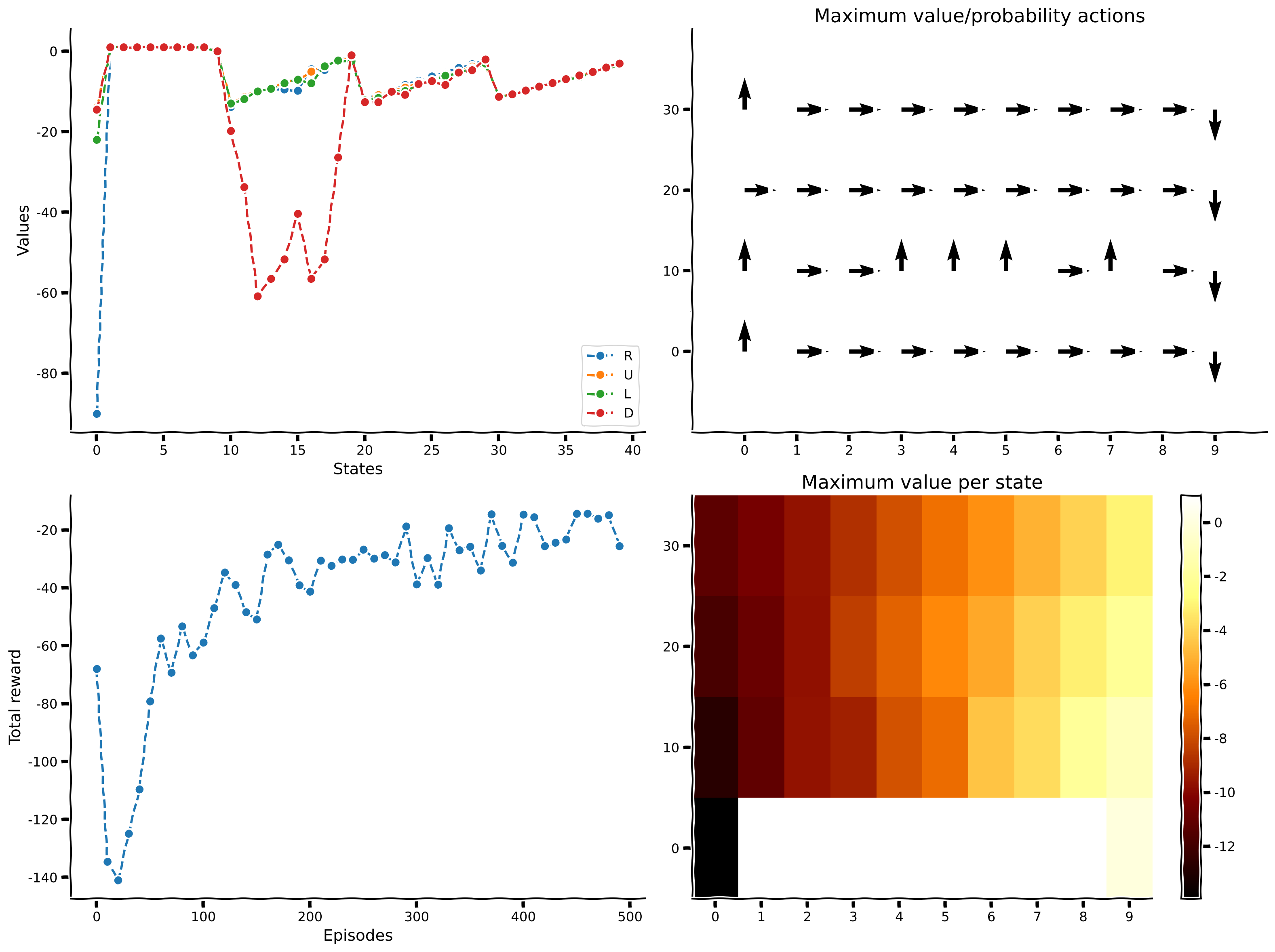
We should see that SARSA also solves the task with similar looking outcomes to Q-learning. One notable difference is that SARSA seems to be skittish around the cliff edge and often goes further away before coming back down to the goal.
Again, feel free to try changing the parameters or random seed and see how the agent’s behavior changes.
Bonus Section 2: On-Policy vs Off-Policy#
We have now seen an example of both on- and off-policy learning algorithms. Let’s compare both Q-learning and SARSA reward results again, side-by-side, to see how they stack up.
Execute to see visualization
Show code cell source
# @markdown Execute to see visualization
# parameters needed by our policy and learning rule
params = {
'epsilon': 0.1, # epsilon-greedy policy
'alpha': 0.1, # learning rate
'gamma': 1.0, # discount factor
}
# episodes/trials
n_episodes = 500
max_steps = 1000
# environment initialization
env = CliffWorld()
# learn Cliff World using Sarsa
np.random.seed(1)
results = learn_environment(env, q_learning, params, max_steps, n_episodes)
value_qlearning, reward_sums_qlearning = results
np.random.seed(1)
results = learn_environment(env, sarsa, params, max_steps, n_episodes)
value_sarsa, reward_sums_sarsa = results
fig, ax = plt.subplots()
ax.plot(reward_sums_qlearning, label='Q-learning')
ax.plot(reward_sums_sarsa, label='SARSA')
ax.set(xlabel='Episodes', ylabel='Total reward')
plt.legend(loc='lower right')
plt.show(fig)
On this simple Cliff World task, Q-learning and SARSA are almost indistinguishable from a performance standpoint, but we can see that Q-learning has a slight-edge within the 500 episode time horizon. Let’s look at the illustrated “greedy policy” plots again.
Execute to see visualization
Show code cell source
# @markdown Execute to see visualization
fig, (ax1, ax2) = plt.subplots(ncols=2, figsize=(16, 6))
plot_quiver_max_action(env, value_qlearning, ax=ax1)
ax1.set(title='Q-learning maximum value/probability actions')
plot_quiver_max_action(env, value_sarsa, ax=ax2)
ax2.set(title='SARSA maximum value/probability actions')
plt.show(fig)
What should immediately jump out is that Q-learning learned to go up, then immediately go to the right, skirting the cliff edge, until it hits the wall and goes down to the goal. The policy further away from the cliff is less certain.
SARSA, on the other hand, appears to avoid the cliff edge, going up one more tile before starting over to the goal side. This also clearly solves the challenge of getting to the goal, but does so at an additional -2 cost over the truly optimal route.
Why do you think these behaviors emerged the way they did?