![]()

Tutorial 4: Autoregressive models#
Week 2, Day 2: Linear Systems
By Neuromatch Academy
Content Creators: Bing Wen Brunton, Biraj Pandey
Content Reviewers: Norma Kuhn, John Butler, Matthew Krause, Ella Batty, Richard Gao, Michael Waskom
Post-Production Team: Gagana B, Spiros Chavlis
Tutorial Objectives#
Estimated timing of tutorial: 30 minutes
The goal of this tutorial is to use the modeling tools and intuitions developed in the previous few tutorials and use them to fit data. The concept is to flip the previous tutorial – instead of generating synthetic data points from a known underlying process, what if we are given data points measured in time and have to learn the underlying process?
This tutorial is in two sections.
Section 1 walks through using regression of data to solve for the coefficient of an OU process from Tutorial 3. Next, Section 2 generalizes this auto-regression framework to high-order autoregressive models, and we will try to fit data from monkeys at typewriters.
Setup#
Install and import feedback gadget#
Show code cell source
# @title Install and import feedback gadget
!pip3 install vibecheck datatops --quiet
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch_cn",
"user_key": "y1x3mpx5",
},
).render()
feedback_prefix = "W2D2_T4"
# Imports
import numpy as np
import matplotlib.pyplot as plt
Figure settings#
Show code cell source
# @title Figure settings
import logging
logging.getLogger('matplotlib.font_manager').disabled = True
import ipywidgets as widgets # interactive display
%config InlineBackend.figure_format = 'retina'
plt.style.use("https://raw.githubusercontent.com/NeuromatchAcademy/course-content/main/nma.mplstyle")
Plotting Functions#
Show code cell source
# @title Plotting Functions
def plot_residual_histogram(res):
"""Helper function for Exercise 4A"""
plt.figure()
plt.hist(res)
plt.xlabel('error in linear model')
plt.title(f'stdev of errors = {res.std():.4f}')
plt.show()
def plot_training_fit(x1, x2, p):
"""Helper function for Exercise 4B"""
plt.figure()
plt.scatter(x2 + np.random.standard_normal(len(x2))*0.02,
np.dot(x1.T, p), alpha=0.2)
plt.title(f'Training fit, order {r} AR model')
plt.xlabel('x')
plt.ylabel('estimated x')
plt.show()
Helper Functions#
Show code cell source
# @title Helper Functions
def ddm(T, x0, xinfty, lam, sig):
'''
Samples a trajectory of a drift-diffusion model.
args:
T (integer): length of time of the trajectory
x0 (float): position at time 0
xinfty (float): equilibrium position
lam (float): process param
sig: standard deviation of the normal distribution
returns:
t (numpy array of floats): time steps from 0 to T sampled every 1 unit
x (numpy array of floats): position at every time step
'''
t = np.arange(0, T, 1.)
x = np.zeros_like(t)
x[0] = x0
for k in range(len(t)-1):
x[k+1] = xinfty + lam * (x[k] - xinfty) + sig * np.random.standard_normal(size=1)
return t, x
def build_time_delay_matrices(x, r):
"""
Builds x1 and x2 for regression
Args:
x (numpy array of floats): data to be auto regressed
r (scalar): order of Autoregression model
Returns:
(numpy array of floats) : to predict "x2"
(numpy array of floats) : predictors of size [r,n-r], "x1"
"""
# construct the time-delayed data matrices for order-r AR model
x1 = np.ones(len(x)-r)
x1 = np.vstack((x1, x[0:-r]))
xprime = x
for i in range(r-1):
xprime = np.roll(xprime, -1)
x1 = np.vstack((x1, xprime[0:-r]))
x2 = x[r:]
return x1, x2
def AR_prediction(x_test, p):
"""
Returns the prediction for test data "x_test" with the regression
coefficients p
Args:
x_test (numpy array of floats): test data to be predicted
p (numpy array of floats): regression coefficients of size [r] after
solving the autoregression (order r) problem on train data
Returns:
(numpy array of floats): Predictions for test data. +1 if positive and -1
if negative.
"""
x1, x2 = build_time_delay_matrices(x_test, len(p)-1)
# Evaluating the AR_model function fit returns a number.
# We take the sign (- or +) of this number as the model's guess.
return np.sign(np.dot(x1.T, p))
def error_rate(x_test, p):
"""
Returns the error of the Autoregression model. Error is the number of
mismatched predictions divided by total number of test points.
Args:
x_test (numpy array of floats): data to be predicted
p (numpy array of floats): regression coefficients of size [r] after
solving the autoregression (order r) problem on train data
Returns:
(float): Error (percentage).
"""
x1, x2 = build_time_delay_matrices(x_test, len(p)-1)
return np.count_nonzero(x2 - AR_prediction(x_test, p)) / len(x2)
Section 1: Fitting data to the OU process#
Video 1: Autoregressive models#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Autoregressive_models_Video")
To see how this works, let’s continue the previous example with the drift-diffusion (OU) process. Our process had the following form:
where \(\eta\) is sampled from a standard normal distribution.
For simplicity, we set \(x_\infty = 0\). Let’s plot a trajectory for this process again below. Take note of the parameters of the process because they will be important later.
Execute to simulate the drift diffusion model
Show code cell source
# @markdown Execute to simulate the drift diffusion model
np.random.seed(2020) # set random seed
# parameters
T = 200
x0 = 10
xinfty = 0
lam = 0.9
sig = 0.2
# drift-diffusion model from tutorial 3
t, x = ddm(T, x0, xinfty, lam, sig)
plt.figure()
plt.title('$x_0=%d, x_{\infty}=%d, \lambda=%0.1f, \sigma=%0.1f$' % (x0, xinfty, lam, sig))
plt.plot(t, x, 'k.')
plt.xlabel('time')
plt.ylabel('position x')
plt.show()
/tmp/ipykernel_6480/4059738216.py:23: DeprecationWarning: Conversion of an array with ndim > 0 to a scalar is deprecated, and will error in future. Ensure you extract a single element from your array before performing this operation. (Deprecated NumPy 1.25.)
x[k+1] = xinfty + lam * (x[k] - xinfty) + sig * np.random.standard_normal(size=1)
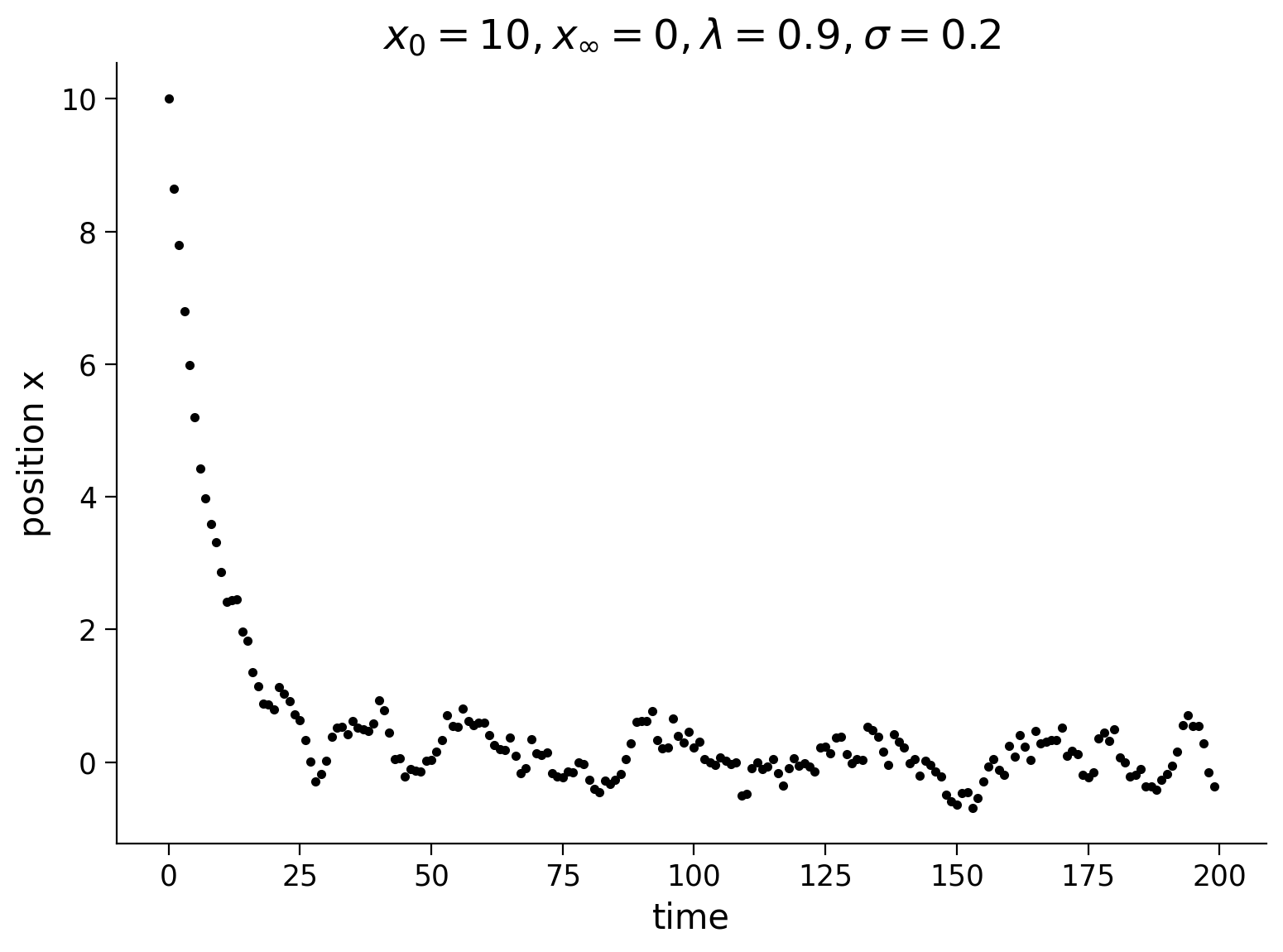
What if we were given these positions \(x\) as they evolve in time as data, how would we get back out the dynamics of the system \(\lambda\)?
Since a little bird told us that this system takes on the form
where \(\eta\) is noise from a normal distribution, our approach is to solve for \(\lambda\) as a regression problem.
As a check, let’s plot every pair of points adjacent in time (\(x_{k+1}\) vs. \(x_k\)) against each other to see if there is a linear relationship between them.
Execute to visualize X(k) vs. X(k+1)
Show code cell source
# @markdown Execute to visualize X(k) vs. X(k+1)
# make a scatter plot of every data point in x
# at time k versus time k+1
plt.figure()
plt.scatter(x[0:-2], x[1:-1], color='k')
plt.plot([0, 10], [0, 10], 'k--', label='$x_{k+1} = x_k$ line')
plt.xlabel('$x_k$')
plt.ylabel('$x_{k+1}$')
plt.legend()
plt.show()
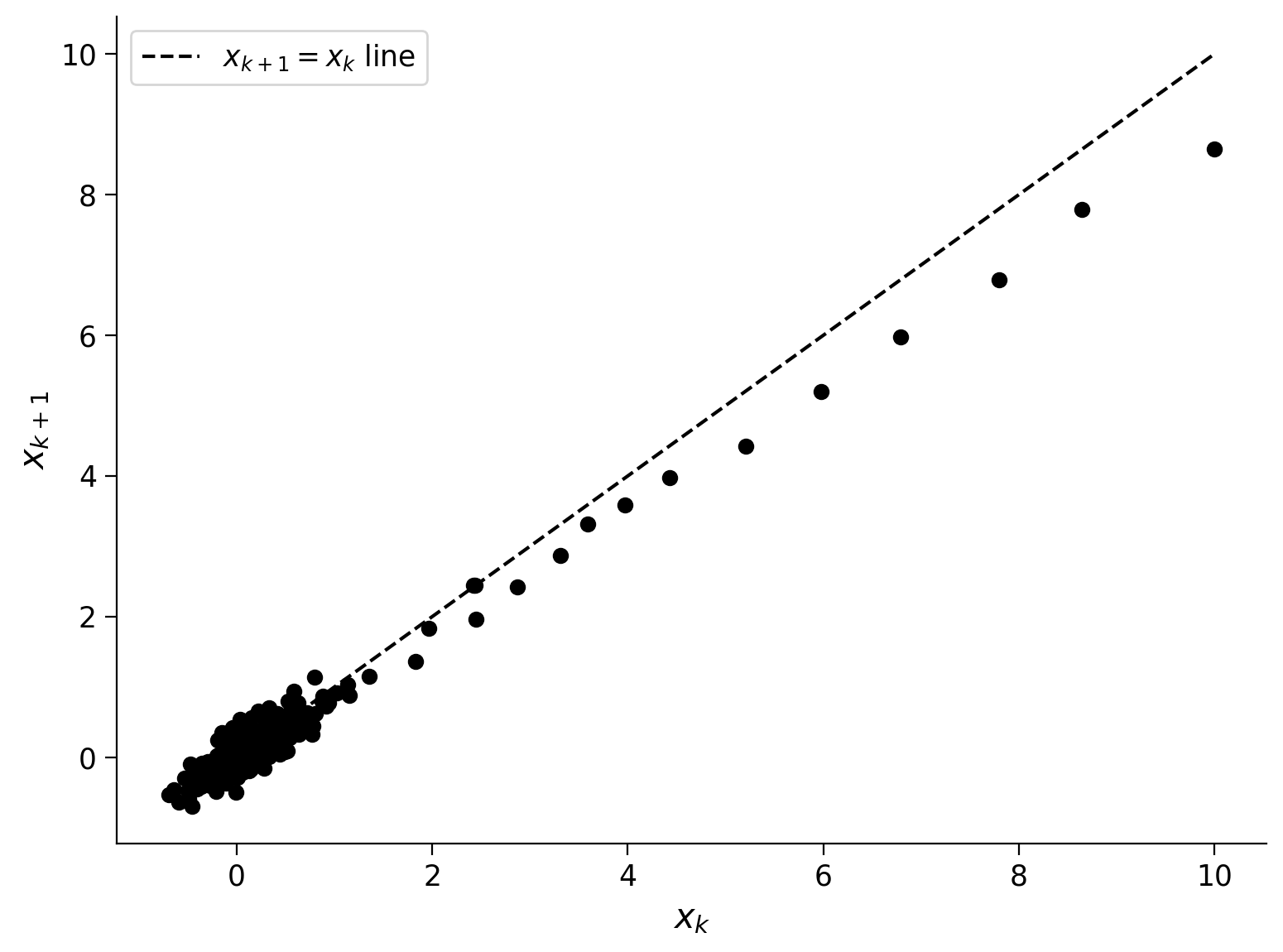
Hooray, it’s a line! This is evidence that the dynamics that generated the data is linear. We can now reformulate this task as a regression problem.
Let \(\mathbf{x_1} = x_{0:T-1}\) and \(\mathbf{x_2} = x_{1:T}\) be vectors of the data indexed so that they are shifted in time by one. Then, our regression problem is
This model is autoregressive, where auto means self. In other words, it’s a regression of the time series on itself from the past. The equation as written above is only a function of itself from one step in the past, so we can call it a first order autoregressive model.
Now, let’s set up the regression problem below and solve for \(\lambda.\) We will plot our data with the regression line to see if they agree.
Execute to solve for lambda through autoregression
Show code cell source
# @markdown Execute to solve for lambda through autoregression
# build the two data vectors from x
x1 = x[0:-2]
x1 = x1[:, np.newaxis]**[0, 1]
x2 = x[1:-1]
# solve for an estimate of lambda as a linear regression problem
p, res, rnk, s = np.linalg.lstsq(x1, x2, rcond=None)
# here we've artificially added a vector of 1's to the x1 array,
# so that our linear regression problem has an intercept term to fit.
# we expect this coefficient to be close to 0.
# the second coefficient in the regression is the linear term:
# that's the one we're after!
lam_hat = p[1]
# plot the data points
fig = plt.figure()
plt.scatter(x[0:-2], x[1:-1], color='k')
plt.xlabel('$x_k$')
plt.ylabel('$x_{k+1}$')
# plot the 45 degree line
plt.plot([0, 10], [0, 10], 'k--', label='$x_{k+1} = x_k$ line')
# plot the regression line on top
xx = np.linspace(-sig*10, max(x), 100)
yy = p[0] + lam_hat * xx
plt.plot(xx, yy, 'r', linewidth=2, label='regression line')
mytitle = 'True $\lambda$ = {lam:.4f}, Estimate $\lambda$ = {lam_hat:.4f}'
plt.title(mytitle.format(lam=lam, lam_hat=lam_hat))
plt.legend()
plt.show()
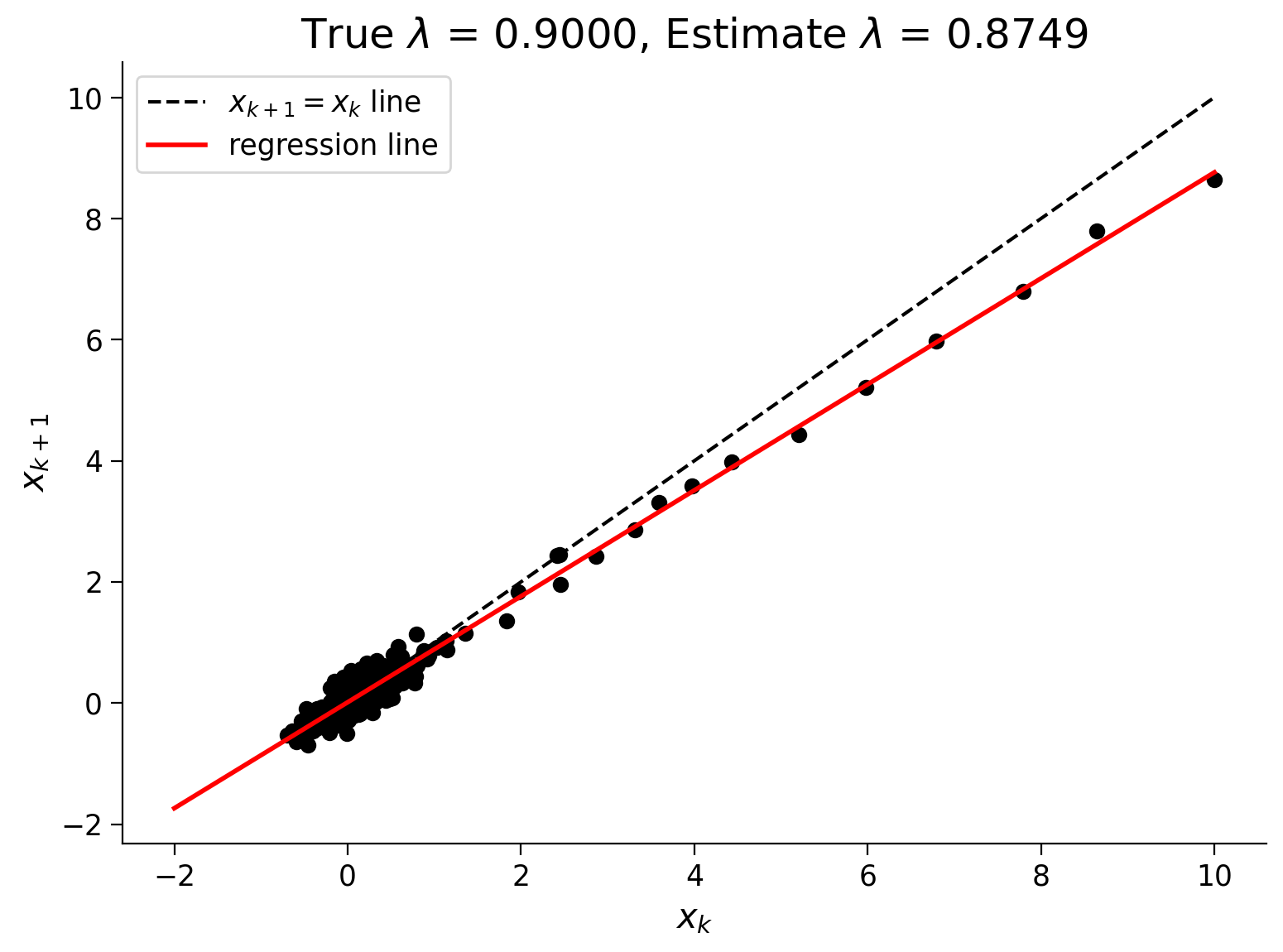
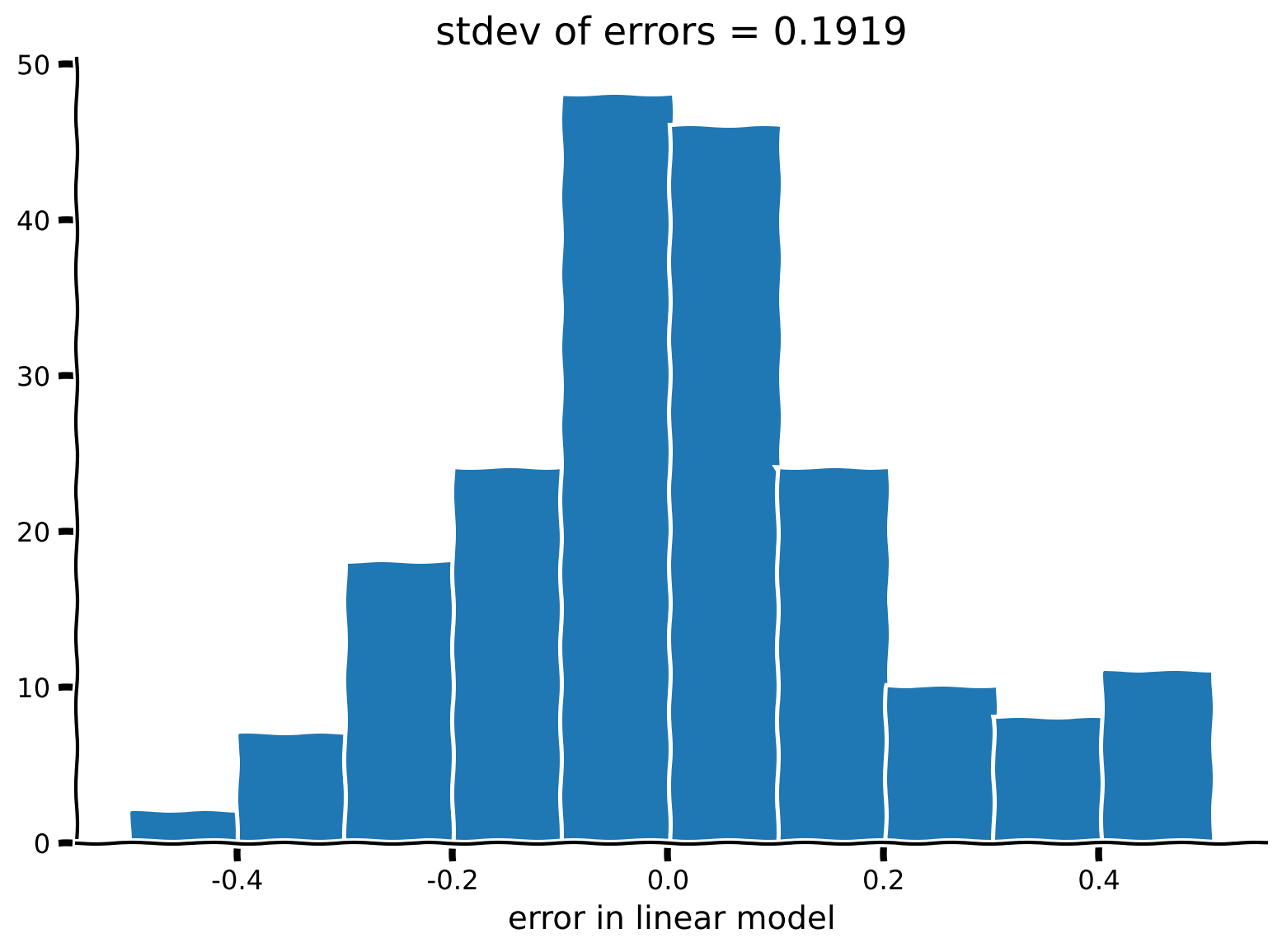
Pretty cool! So now we have a way to predict \(x_{k+1}\) if given any data point \(x_k\). Let’s take a look at how accurate this one-step prediction might be by plotting the residuals.
Coding Exercise 1: Residuals of the autoregressive model#
Referred to as exercise 4A in video
Plot a histogram of residuals of our autoregressive model, by taking the difference between the data \(\mathbf{x_2}\) and the model prediction. Do you notice anything about the standard deviation of these residuals and the equations that generated this synthetic dataset?
##############################################################################
## Insert your code here take to compute the residual (error)
raise NotImplementedError('student exercise: compute the residual error')
##############################################################################
# compute the predicted values using the autoregressive model (lam_hat), and
# the residual is the difference between x2 and the prediction
res = ...
# Visualize
plot_residual_histogram(res)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Residuals_of_the_autoregressive_model_Exercise")
Section 2: Higher order autoregressive models#
Estimated timing to here from start of tutorial: 15 min
Video 2: Monkey at a typewriter#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Monkey_at_a_typewriter_Video")
Now that we have established the autoregressive framework, generalizing for dependence on data points from the past is straightforward. Higher order autoregression models a future time point based on more than one point in the past.
In one dimension, we can write such an order-\(r\) model as
where the \(\alpha\)’s are the \(r+1\) coefficients to be fit to the data available.
These models are useful to account for some history dependence in the trajectory of time series. This next part of the tutorial will explore one such time series, and you can do an experiment on yourself!
In particular, we will explore a binary random sequence of 0’s and 1’s that would occur if you flipped a coin and jotted down the flips.
The difference is that, instead of actually flipping a coin (or using code to generate such a sequence), you – yes you, human – are going to generate such a random Bernoulli sequence as best as you can by typing in 0’s and 1’s. We will then build higher-order AR models to see if we can identify predictable patterns in the time-history of digits you generate.
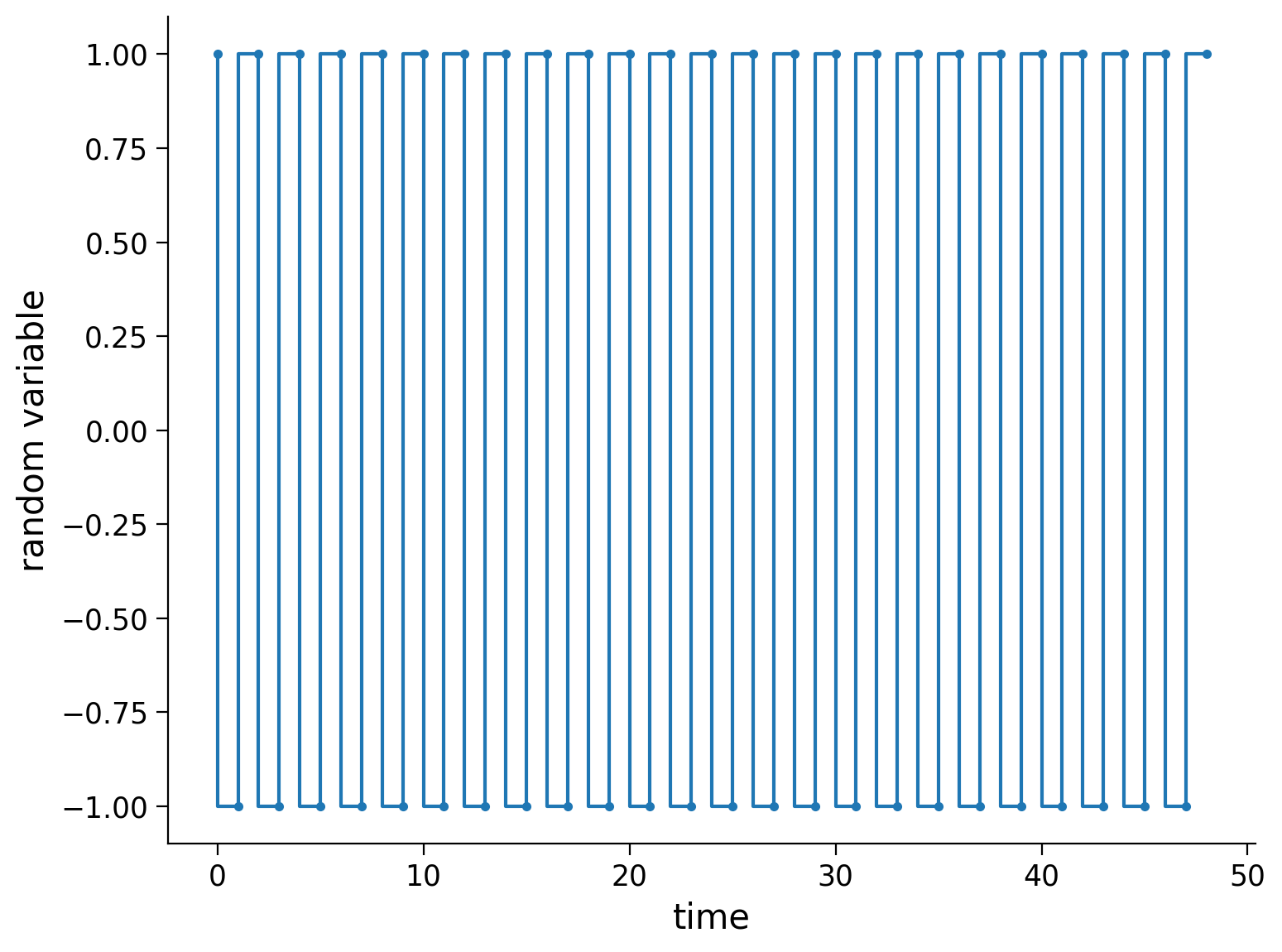
But first, let’s try this on a sequence with a simple pattern, just to make sure the framework is functional. Below, we generate an entirely predictable sequence and plot it.
# this sequence is entirely predictable, so an AR model should work
monkey_at_typewriter = '1010101010101010101010101010101010101010101010101'
# Bonus: this sequence is also predictable, but does an order-1 AR model work?
#monkey_at_typewriter = '100100100100100100100100100100100100100'
# function to turn chars to numpy array,
# coding it this way makes the math easier
# '0' -> -1
# '1' -> +1
def char2array(s):
m = [int(c) for c in s]
x = np.array(m)
return x*2 - 1
x = char2array(monkey_at_typewriter)
plt.figure()
plt.step(x, '.-')
plt.xlabel('time')
plt.ylabel('random variable')
plt.show()
Now, let’s set up our regression problem (order 1 autoregression like above) by defining \(\mathbf{x_1}\) and \(\mathbf{x_2}\) and solve it.
# build the two data vectors from x
x1 = x[0:-2]
x1 = x1[:, np.newaxis]**[0, 1]
x2 = x[1:-1]
# solve for an estimate of lambda as a linear regression problem
p, res, rnk, s = np.linalg.lstsq(x1, x2, rcond=None)
# take a look at the resulting regression coefficients
print(f'alpha_0 = {p[0]:.2f}, alpha_1 = {p[1]:.2f}')
alpha_0 = -0.00, alpha_1 = -1.00
Think! 2: Understanding autoregressive parameters#
Do the values we got for \(\alpha_0\) and \(\alpha_1\) make sense? Write down the corresponding autoregressive model and convince yourself that it gives the alternating 0’s and 1’s we asked it to fit as data.
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Understanding_autoregressive_parameters_Discussion")
Truly random sequences of numbers have no structure and should not be predictable by an AR or any other models.
However, humans are notoriously terrible at generating random sequences of numbers! (Other animals are no better…)
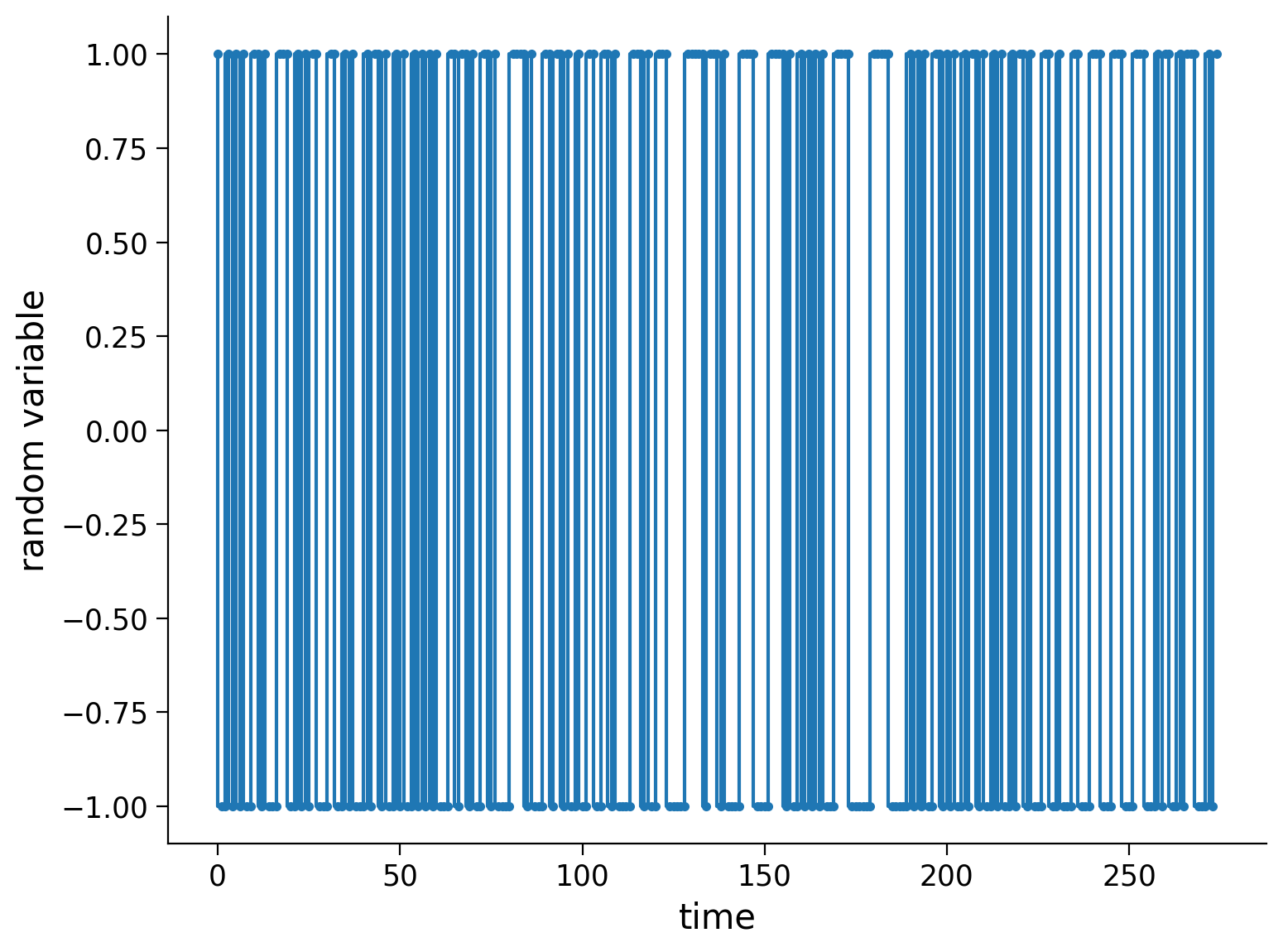
To test out an application of higher-order AR models, let’s use them to model a sequence of 0’s and 1’s that a human tried to produce at random. In particular, I convinced my 9-yr-old monkey to sit at a typewriter (my laptop) and enter some digits as randomly as he is able. The digits he typed in are in the code, and we can plot them as a time series of digits here.
If the digits really have no structure, then we expect our model to do about as well as guessing, producing an error rate of 0.5. Let’s see how well we can do!
# data generated by 9-yr-old JAB:
# we will be using this sequence to train the data
monkey_at_typewriter = '10010101001101000111001010110001100101000101101001010010101010001101101001101000011110100011011010010011001101000011101001110000011111011101000011110000111101001010101000111100000011111000001010100110101001011010010100101101000110010001100011100011100011100010110010111000101'
# we will be using this sequence to test the data
test_monkey = '00100101100001101001100111100101011100101011101001010101000010110101001010100011110'
x = char2array(monkey_at_typewriter)
test = char2array(test_monkey)
## testing: machine generated randint should be entirely unpredictable
## uncomment the lines below to try random numbers instead
# np.random.seed(2020) # set random seed
# x = char2array(np.random.randint(2, size=500))
# test = char2array(np.random.randint(2, size=500))
plt.figure()
plt.step(x, '.-')
plt.xlabel('time')
plt.ylabel('random variable')
plt.show()
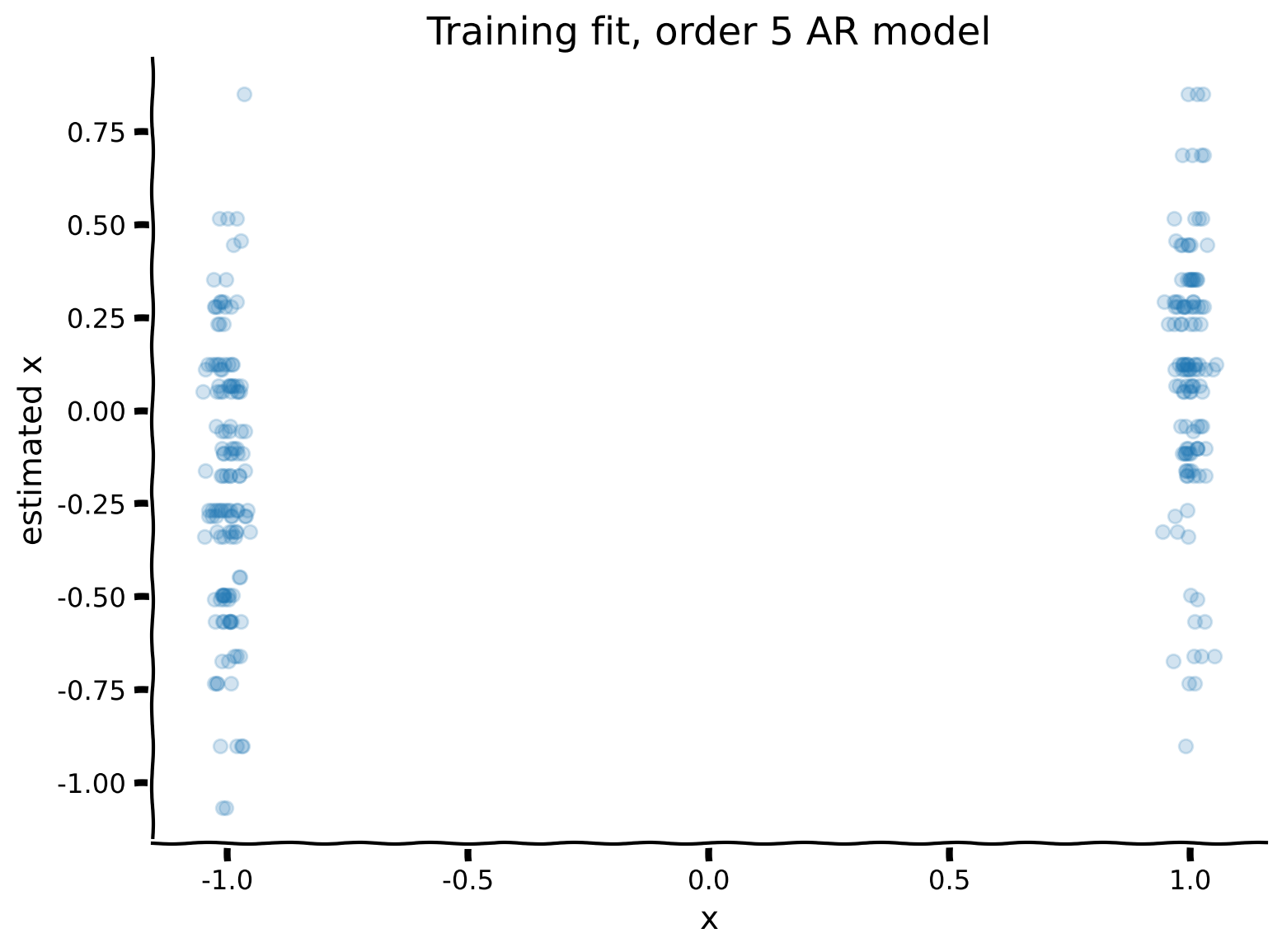
Coding Exercise 2: Fitting AR models#
Referred to in video as exercise 4B
Fit a order-5 (\(r=5\)) AR model to the data vector \(x\). To do this, we have included some helper functions, including AR_model.
We will then plot the observations against the trained model. Note that this means we are using a sequence of the previous 5 digits to predict the next one.
Additionally, output from our regression model is continuous (real numbers) whereas our data are scalar (+1/-1). So, we will take the sign of our continuous outputs (+1 if positive and -1 if negative) as our predictions to make them comparable with data. Our error rate will simply be the number of mismatched predictions divided by the total number of predictions.
Execute this cell to get helper function AR_model
Show code cell source
# @markdown Execute this cell to get helper function `AR_model`
def AR_model(x, r):
"""
Solves Autoregression problem of order (r) for x
Args:
x (numpy array of floats): data to be auto regressed
r (scalar): order of Autoregression model
Returns:
(numpy array of floats) : to predict "x2"
(numpy array of floats) : predictors of size [r,n-r], "x1"
(numpy array of floats): coefficients of length [r] for prediction after
solving the regression problem "p"
"""
x1, x2 = build_time_delay_matrices(x, r)
# solve for an estimate of lambda as a linear regression problem
p, res, rnk, s = np.linalg.lstsq(x1.T, x2, rcond=None)
return x1, x2, p
help(AR_model)
Help on function AR_model in module __main__:
AR_model(x, r)
Solves Autoregression problem of order (r) for x
Args:
x (numpy array of floats): data to be auto regressed
r (scalar): order of Autoregression model
Returns:
(numpy array of floats) : to predict "x2"
(numpy array of floats) : predictors of size [r,n-r], "x1"
(numpy array of floats): coefficients of length [r] for prediction after
solving the regression problem "p"
##############################################################################
## TODO: Insert your code here for fitting the AR model
raise NotImplementedError('student exercise: fit AR model')
##############################################################################
# define the model order, and use AR_model() to generate the model and prediction
r = ...
x1, x2, p = AR_model(...)
# Plot the Training data fit
# Note that this adds a small amount of jitter to horizontal axis for visualization purposes
plot_training_fit(x1, x2, p)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Fitting_AR_models_Exercise")
Let’s check out how the model does on the test data that it’s never seen before!
Execute to see model performance on test data
Show code cell source
# @markdown Execute to see model performance on test data
x1_test, x2_test = build_time_delay_matrices(test, r)
plt.figure()
plt.scatter(x2_test+np.random.standard_normal(len(x2_test))*0.02,
np.dot(x1_test.T, p), alpha=0.5)
mytitle = f'Testing fit, order {r} AR model, err = {error_rate(test, p):.3f}'
plt.title(mytitle)
plt.xlabel('test x')
plt.ylabel('estimated x')
plt.show()
Not bad! We’re getting errors that are smaller than 0.5 (what we would have gotten by chance).
Let’s now try AR models of different orders systematically, and plot the test error of each.
Remember: The model has never seen the test data before, and random guessing would produce an error of \(0.5\).
Execute to visualize errors for different orders
Show code cell source
# @markdown Execute to visualize errors for different orders
# range of r's to try
r = np.arange(1, 21)
err = np.ones_like(r) * 1.0
for i, rr in enumerate(r):
# fitting the model on training data
x1, x2, p = AR_model(x, rr)
# computing and storing the test error
test_error = error_rate(test, p)
err[i] = test_error
plt.figure()
plt.plot(r, err, '.-')
plt.plot([1, r[-1]], [0.5, 0.5], 'r--', label='random chance')
plt.xlabel('Order r of AR model')
plt.ylabel('Test error')
plt.xticks(np.arange(0,25,5))
plt.legend()
plt.show()
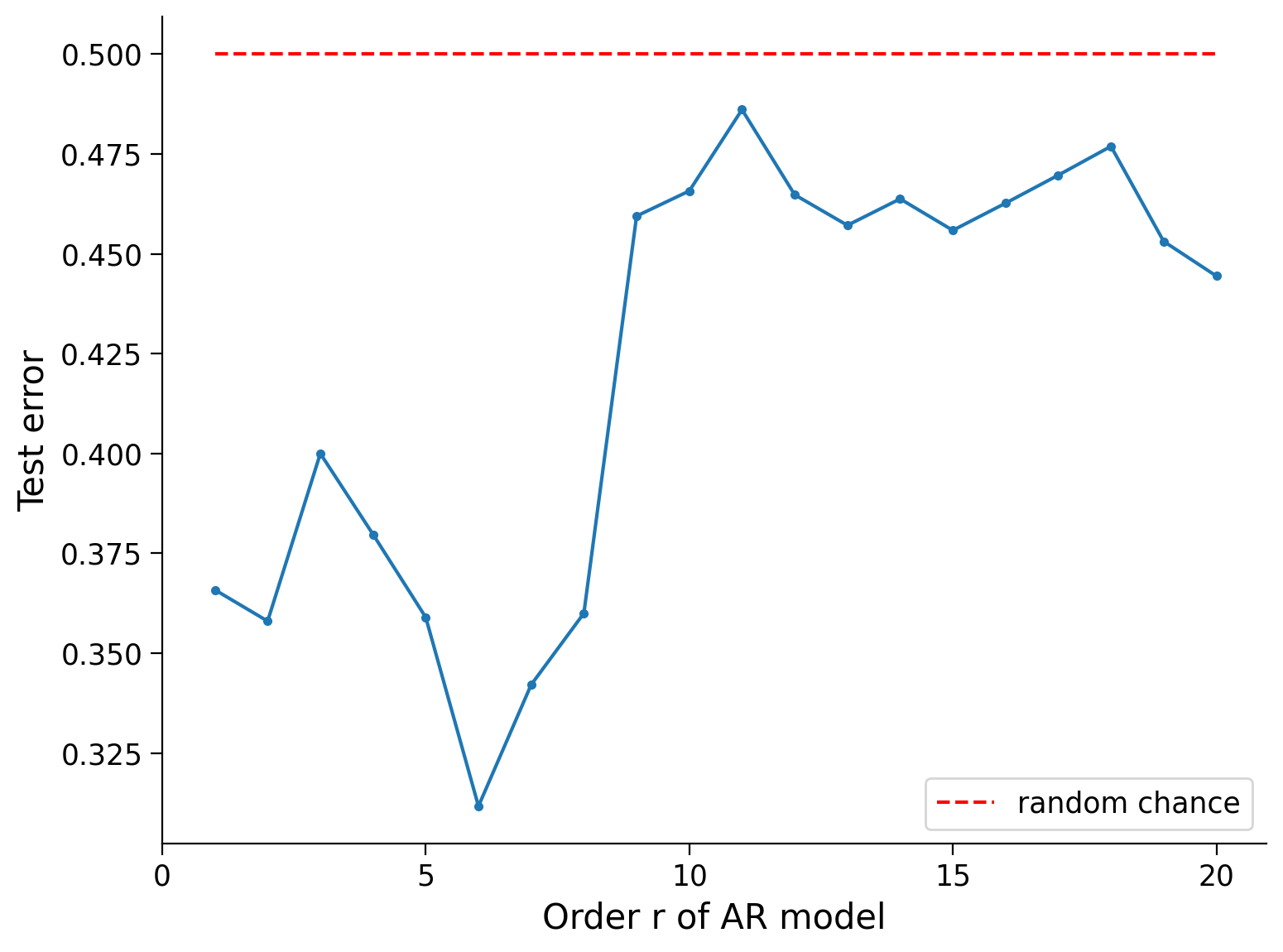
Notice that there’s a sweet spot in the test error! The 6th order AR model does a really good job here, and for larger \(r\)’s, the model starts to overfit the training data and does not do well on the test data.
In summary:
“I can’t believe I’m so predictable!” - JAB
Summary#
Estimated timing of tutorial: 30 minutes
In this tutorial, we learned:
How learning the parameters of a linear dynamical system can be formulated as a regression problem from data.
Time-history dependence can be incorporated into the regression framework as a multiple regression problem.
That humans are no good at generating random (not predictable) sequences. Try it on yourself!