![]()

Tutorial 3: The Kalman Filter#
Week 3, Day 2: Hidden Dynamics
By Neuromatch Academy
Content creators: Itzel Olivos Castillo and Xaq Pitkow
Production editors: Gagana B, Spiros Chavlis
Useful reference:
Roweis, Ghahramani (1998): A unifying review of linear Gaussian Models
Bishop (2006): Pattern Recognition and Machine Learning
Tutorial Objectives#
Estimated timing of tutorial: 1 hour, 15 minutes
In previous tutorials we used Hidden Markov Models (HMM) to infer discrete latent states from a sequence of measurements. In this tutorial, we will learn how to infer a continuous latent variable using the Kalman filter, which is one version of an HMM.
In this tutorial, you will:
Review linear dynamical systems
Learn about the Kalman filter in one dimension
Manipulate parameters of a process to see how the Kalman filter behaves
Think about some core properties of the Kalman filter.
You can imagine this inference process happening as Mission Control tries to locate and track Astrocat. But you can also imagine that the brain is using an analogous Hidden Markov Model to track objects in the world, or to estimate the consequences of its own actions. And you could use this technique to estimate brain activity from noisy measurements, for understanding or for building a brain-machine interface.
Setup#
Install and import feedback gadget#
Show code cell source
# @title Install and import feedback gadget
!pip3 install vibecheck datatops --quiet
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch_cn",
"user_key": "y1x3mpx5",
},
).render()
feedback_prefix = "W3D2_T3"
# Imports
import pandas as pd
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from matplotlib import transforms
from collections import namedtuple
from scipy.stats import norm
Figure Settings#
Show code cell source
# @title Figure Settings
import logging
logging.getLogger('matplotlib.font_manager').disabled = True
import ipywidgets as widgets # interactive display
from ipywidgets import interactive, interact, HBox, Layout,VBox
from IPython.display import HTML
%config InlineBackend.figure_format = 'retina'
plt.style.use("https://raw.githubusercontent.com/NeuromatchAcademy/course-content/main/nma.mplstyle")
Plotting Functions#
Show code cell source
# @title Plotting Functions
def visualize_Astrocat(s, T):
plt.plot(s, color='limegreen', lw=2)
plt.plot([T], [s[-1]], marker='o', markersize=8, color='limegreen')
plt.xlabel('Time t')
plt.ylabel('s(t)')
plt.show()
def plot_measurement(s, m, T):
plt.plot(s, color='limegreen', lw=2, label='true position')
plt.plot([T], [s[-1]], marker='o', markersize=8, color='limegreen')
plt.plot(m, '.', color='crimson', lw=2, label='measurement')
plt.xlabel('Time t')
plt.ylabel('s(t)')
plt.legend()
plt.show()
def plot_function(u=1,v=2,w=3,x=4,y=5,z=6):
time = np.arange(0, 1, 0.01)
df = pd.DataFrame({"y1":np.sin(time*u*2*np.pi),
"y2":np.sin(time*v*2*np.pi),
"y3":np.sin(time*w*2*np.pi),
"y4":np.sin(time*x*2*np.pi),
"y5":np.sin(time*y*2*np.pi),
"y6":np.sin(time*z*2*np.pi)})
df.plot()
Helper Functions#
Show code cell source
# @title Helper Functions
gaussian = namedtuple('Gaussian', ['mean', 'cov'])
def filter(D, process_noise, measurement_noise, posterior, m):
todays_prior = gaussian(D * posterior.mean, D**2 * posterior.cov + process_noise)
likelihood = gaussian(m, measurement_noise)
info_prior = 1/todays_prior.cov
info_likelihood = 1/likelihood.cov
info_posterior = info_prior + info_likelihood
prior_weight = info_prior / info_posterior
likelihood_weight = info_likelihood / info_posterior
posterior_mean = prior_weight * todays_prior.mean + likelihood_weight * likelihood.mean
posterior_cov = 1/info_posterior
todays_posterior = gaussian(posterior_mean, posterior_cov)
"""
prior = gaussian(belief.mean, belief.cov)
predicted_estimate = D * belief.mean
predicted_covariance = D**2 * belief.cov + process_noise
likelihood = gaussian(m, measurement_noise)
innovation_estimate = m - predicted_estimate
innovation_covariance = predicted_covariance + measurement_noise
K = predicted_covariance / innovation_covariance # Kalman gain, i.e. the weight given to the difference between the measurement and predicted measurement
updated_mean = predicted_estimate + K * innovation_estimate
updated_cov = (1 - K) * predicted_covariance
todays_posterior = gaussian(updated_mean, updated_cov)
"""
return todays_prior, likelihood, todays_posterior
def paintMyFilter(D, initial_guess, process_noise, measurement_noise, s, m, s_, cov_):
# Compare solution with filter function
filter_s_ = np.zeros(T) # estimate (posterior mean)
filter_cov_ = np.zeros(T) # uncertainty (posterior covariance)
posterior = initial_guess
filter_s_[0] = posterior.mean
filter_cov_[0] = posterior.cov
process_noise_std = np.sqrt(process_noise)
measurement_noise_std = np.sqrt(measurement_noise)
for i in range(1, T):
prior, likelihood, posterior = filter(D, process_noise, measurement_noise, posterior, m[i])
filter_s_[i] = posterior.mean
filter_cov_[i] = posterior.cov
smin = min(min(m),min(s-2*np.sqrt(cov_[-1])), min(s_-2*np.sqrt(cov_[-1])))
smax = max(max(m),max(s+2*np.sqrt(cov_[-1])), max(s_+2*np.sqrt(cov_[-1])))
pscale = 0.2 # scaling factor for displaying pdfs
fig = plt.figure(figsize=[15, 10])
ax = plt.subplot(2, 1, 1)
ax.set_xlabel('time')
ax.set_ylabel('state')
ax.set_xlim([0, T+(T*pscale)])
ax.set_ylim([smin, smax])
ax.plot(t, s, color='limegreen', lw=2, label="Astrocat's trajectory")
ax.plot([t[-1]], [s[-1]], marker='o', markersize=8, color='limegreen')
ax.plot(t, m, '.', color='crimson', lw=2, label='measurements')
ax.plot([t[-1]], [m[-1]], marker='o', markersize=8, color='crimson')
ax.plot(t, filter_s_, color='black', lw=2, label='correct estimated trajectory')
ax.plot([t[-1]], [filter_s_[-1]], marker='o', markersize=8, color='black')
res = '! :)' if np.mean((s_ - filter_s_)**2) < 0.1 else ' :('
ax.plot(t, s_, '--', color='lightgray', lw=2, label='your estimated trajectory' + res)
ax.plot([t[-1]], [s_[-1]], marker='o', markersize=8, color='lightgray')
plt.legend()
plt.show()
Section 1: Astrocat Dynamics#
Video 1: Astrocat through time#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Astrocat_through_time_Video")
Video 2: Quantifying Astrocat dynamics#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Quantifying_Astrocat_dynamics_Video")
Section 1.1: Simulating Astrocat’s movements#
Coding Exercise 1.1: Simulating Astrocat’s movements#
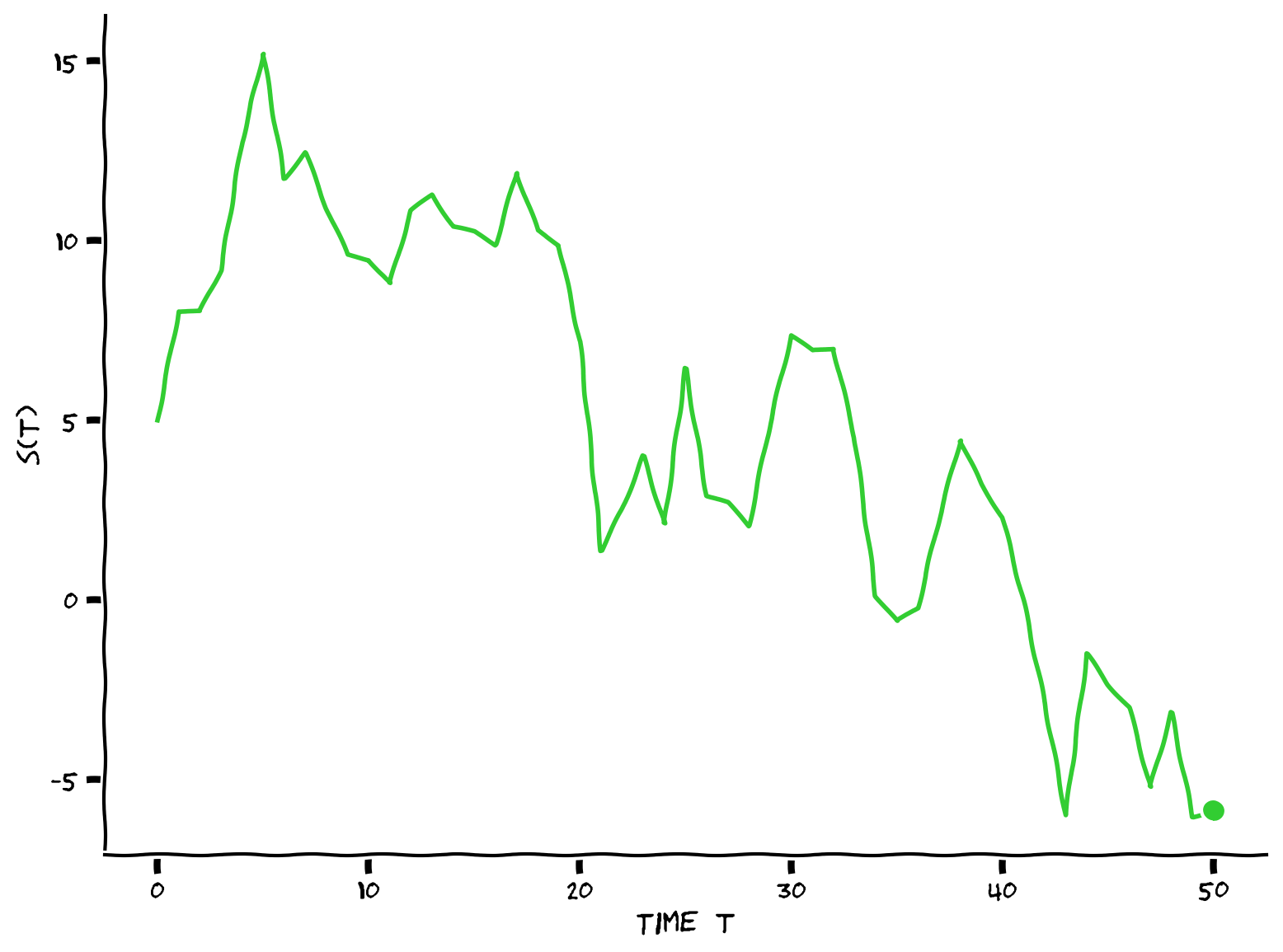
First, you will simulate how Astrocat moves based on stochastic linear dynamics.
The linear dynamical system \(s_t = Ds_{t-1} + w_{t-1}\) determines Astrocat’s position \(s_t\). \(D\) is a scalar that models how Astrocat would like to change its position over time, and \(w_t \sim \mathcal{N}(0, \sigma_p^2)\) is white Gaussian noise caused by unreliable actuators in Astrocat’s propulsion unit.
Complete the code below to simulate possible trajectories.
First, execute the following cell to enable the default parameters we will use in this tutorial.
# Fixed params
np.random.seed(0)
T_max = 200
D = 1
tau_min = 1
tau_max = 50
process_noise_min = 0.1
process_noise_max = 10
measurement_noise_min = 0.1
measurement_noise_max = 10
unit_process_noise = np.random.randn(T_max) # compute all N(0, 1) in advance to speed up time slider
unit_measurement_noise = np.random.randn(T_max) # compute all N(0, 1) in advance to speed up time slider
def simulate(D, s0, sigma_p, T):
""" Compute the response of the linear dynamical system.
Args:
D (scalar): dynamics multiplier
s0 (scalar): initial position
sigma_p (scalar): amount of noise in the system (standard deviation)
T (scalar): total duration of the simulation
Returns:
ndarray: `s`: astrocat's trajectory up to time T
"""
# Initialize variables
s = np.zeros(T+1)
s[0] = s0
# Compute the position at time t given the position at time t-1 for all t
# Consider that np.random.normal(mu, sigma) generates a random sample from
# a gaussian with mean = mu and standard deviation = sigma
for t in range(1, len(s)):
###################################################################
## Fill out the following then remove
raise NotImplementedError("Student exercise: need to implement simulation")
###################################################################
# Update position
s[t] = ...
return s
# Set random seed
np.random.seed(0)
# Set parameters
D = 0.9 # parameter in s(t)
T = 50 # total time duration
s0 = 5. # initial condition of s at time 0
sigma_p = 2 # amount of noise in the actuators of astrocat's propulsion unit
# Simulate Astrocat
s = simulate(D, s0, sigma_p, T)
# Visualize
visualize_Astrocat(s, T)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Simulating_Astrocats_movements_Exercise")
Interactive Demo 1.1: Playing with Astrocat movement#
We will use the function you just implemented in a demo, where you can change the value of \(D\) and see what happens.
What happens when D is large (>1)? Why?
What happens when D is a large negative number (<-1)? Why?
What about when D is zero?
Execute this cell to enable the demo
Show code cell source
# @markdown Execute this cell to enable the demo
@widgets.interact(D=widgets.FloatSlider(value=-.5, min=-2, max=2, step=0.1))
def plot(D=D):
# Set parameters
T = 50 # total time duration
s0 = 5. # initial condition of s at time 0
sigma_p = 2 # amount of noise in the actuators of astrocat's propulsion unit
# Simulate Astrocat
s = simulate(D, s0, sigma_p, T)
# Visualize
visualize_Astrocat(s, T)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Playing_with_Astrocat_movement_Interactive_Demo_and_Discussion")
Video 3: Exercise 1.1 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Exercise_1.1_Discussion_Video")
Section 1.2: Measuring Astrocat’s movements#
Estimated timing to here from start of tutorial: 10 min
Video 4: Reading measurements from Astrocat’s collar#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Measuring_Astrocats_movements_Video")
Coding Exercise 1.2.1: Reading measurements from Astrocat’s collar#
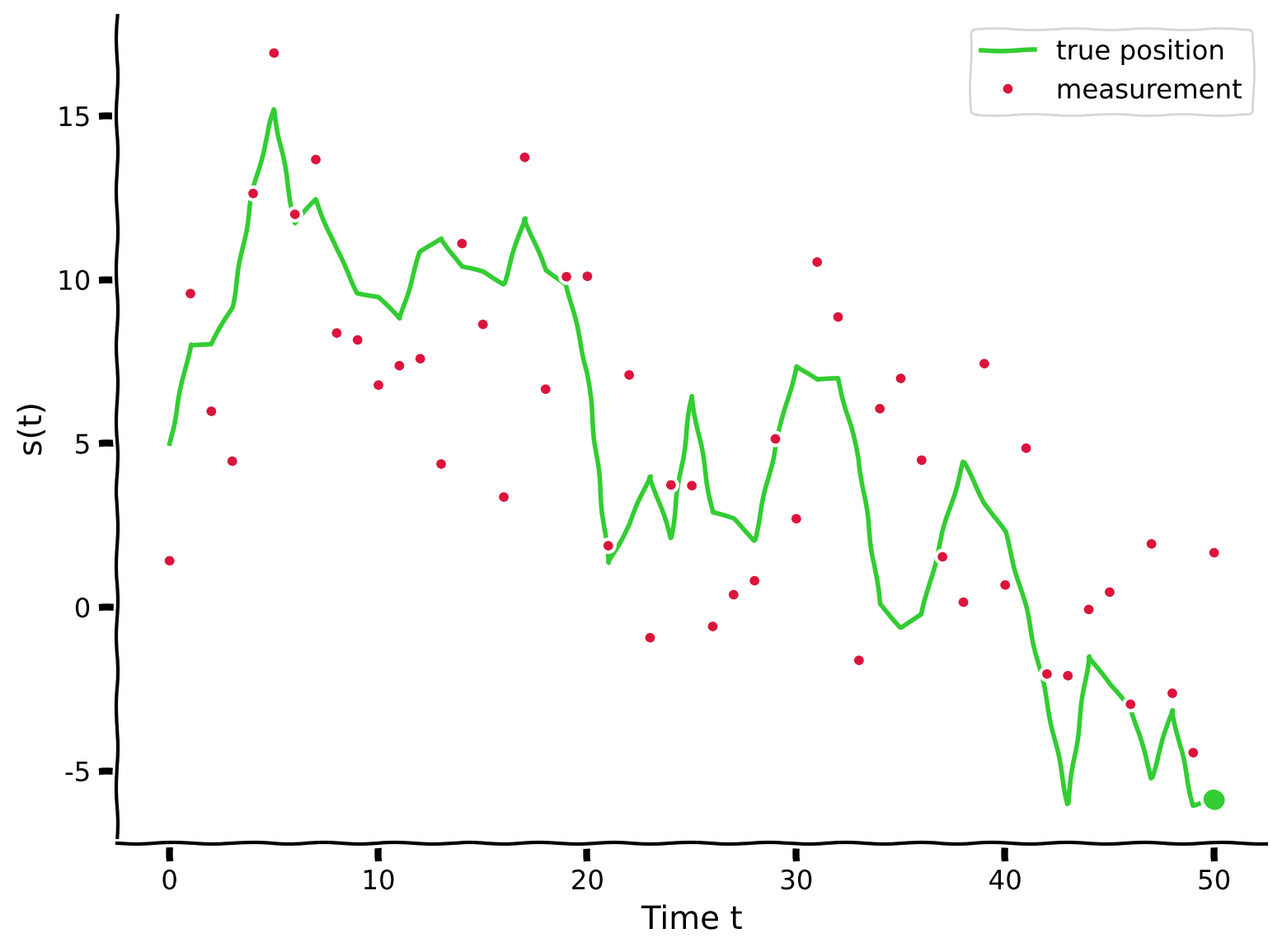
We will estimate Astrocat’s actual position using measurements of a noisy sensor attached to its collar.
Complete the function below to read measurements from Astrocat’s collar. These measurements are correct except for additive Gaussian noise whose standard deviation is given by the input argument sigma_measurements.
def read_collar(s, sigma_measurements):
""" Compute the measurements of the noisy sensor attached to astrocat's collar
Args:
s (ndarray): astrocat's true position over time
sigma_measurements (scalar): amount of noise in the sensor (standard deviation)
Returns:
ndarray: `m`: astrocat's position over time according to the sensor
"""
# Initialize variables
m = np.zeros(len(s))
# For all time t, add white Gaussian noise with magnitude sigma_measurements
# Consider that np.random.normal(mu, sigma) generates a random sample from
# a gaussian with mean = mu and standard deviation = sigma
for t in range(len(s)):
###################################################################
## Fill out the following then remove
raise NotImplementedError("Student exercise: need to implement read_collar function")
###################################################################
# Read measurement
m[t] = ...
return m
# Set parameters
np.random.seed(0)
D = 0.9 # parameter in s(t)
T = 50 # total time duration
s0 = 5. # initial condition of s at time 0
sigma_p = 2 # amount of noise in the actuators of astrocat's propulsion unit
sigma_measurements = 4 # amount of noise in astrocat's collar
# Simulate Astrocat
s = simulate(D, s0, sigma_p, T)
# Take measurement from collar
m = read_collar(s, sigma_measurements)
# Visualize
plot_measurement(s, m, T)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Reading_measurements_from_Astrocats_collar_Exercise")
Video 5: Exercise 1.2.1 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Exercise_1.2.1_Discussion_Video")
Video 6: Comparing true states to measured states#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Comparing_true_states_to_measured_states_Video")
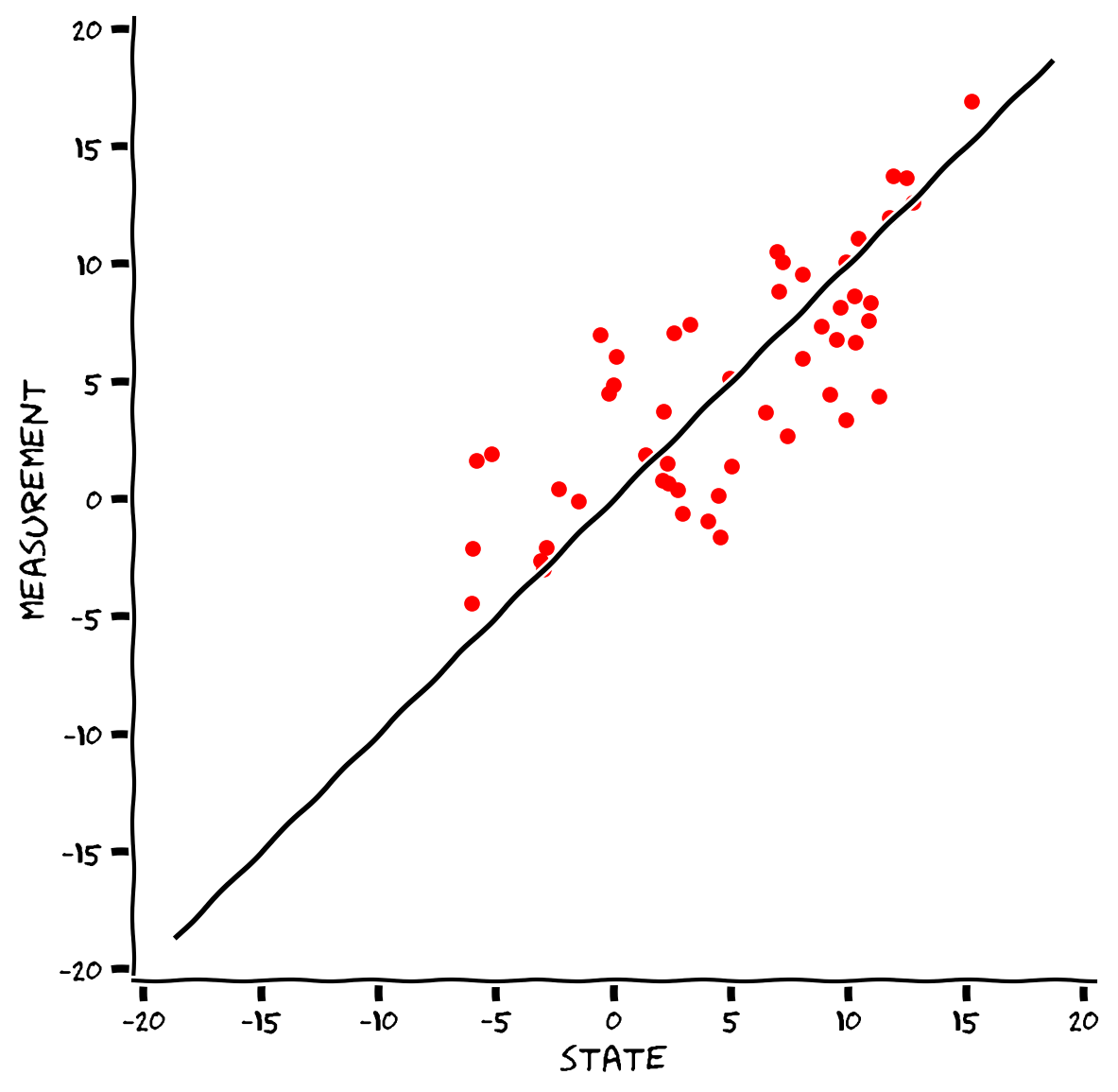
Coding Exercise 1.2.2: Compare true states to measured states#
Make a scatter plot to see how bad the measurements of Astrocat’s collar are. This exercise will show why using only the measures to track Astrocat can be catastrophic.
A Kalman filter will solve this problem!
def compare(s, m):
""" Compute a scatter plot
Args:
s (ndarray): astrocat's true position over time
m (ndarray): astrocat's measured position over time according to the sensor
"""
###################################################################
## Fill out the following then remove
raise NotImplementedError("Student exercise: need to implement compare function")
###################################################################
fig = plt.figure()
ax = fig.add_subplot(111)
sbounds = 1.1*max(max(np.abs(s)), max(np.abs(m)))
ax.plot([-sbounds, sbounds], [-sbounds, sbounds], 'k') # plot line of equality
ax.set_xlabel('state')
ax.set_ylabel('measurement')
ax.set_aspect('equal')
# Complete a scatter plot: true state versus measurements
...
plt.show()
# Set parameters
np.random.seed(0)
D = 0.9 # parameter in s(t)
T = 50 # total time duration
s0 = 5. # initial condition of s at time 0
sigma_p = 2 # amount of noise in the actuators of astrocat's propulsion unit
sigma_measurements = 4 # amount of noise in astrocat's collar
# Simulate Astrocat
s = simulate(D, s0, sigma_p, T)
# Take measurement from collar
m = read_collar(s, sigma_measurements)
# Visualize true vs measured states
compare(s, m)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Compare_true_states_to_measured_states_Exercise")
Video 7: Exercise 1.2.2 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Exercise_1.2.2_Discussion_Video")
Section 2: The Kalman filter#
Section 2.1: Using the Kalman filter#
Estimated timing to here from start of tutorial: 20 min
Video 8: The Kalman filter#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_The_Kalman_filter_Video")
Interactive Demo 2.1: The Kalman filter in action#
Next we provide you with an interactive visualization to understand how the Kalman filter works. Play with the sliders to gain an intuition for how the different factors affect the Kalman filter’s inferences. You will code the Kalman filter yourself in the next exercise.
The sliders:
current time: Kalman filter synthesizes measurements up until this time.
dynamics time constant \(\tau\): this determines the dynamics value, \(D=\exp^{-\Delta t/\tau}\) where \(\Delta t\) is the discrete time step (here 1).
process noise: amount of noise in the actuators of astrocat’s propulsion unit
observation noise: the noise levels of our measurements (when we read the collar)
Some questions to consider:
What affects the predictability of Astrocat?
How does confidence change over time?
What affects the relative weight of the new measurement?
How is the error related to the posterior variance?
Execute this cell to enable the widget. It takes a few seconds to update so please be patient.
Show code cell source
# @markdown Execute this cell to enable the widget. It takes a few seconds to update so please be patient.
display(HTML('''<style>.widget-label { min-width: 15ex !important; }</style>'''))
@widgets.interact(T=widgets.IntSlider(T_max/4, description="current time",
min=1, max=T_max-1),
tau=widgets.FloatSlider(tau_max/2,
description='dynamics time constant',
min=tau_min, max=tau_max),
process_noise=widgets.FloatSlider(2,
description="process noise",
min=process_noise_min,
max=process_noise_max),
measurement_noise=widgets.FloatSlider(3,
description="observation noise",
min=measurement_noise_min,
max=measurement_noise_max),
flag_s = widgets.Checkbox(value=True,
description='state',
disabled=True, indent=False),
flag_m = widgets.Checkbox(value=False,
description='measurement',
disabled=False, indent=False),
flag_s_ = widgets.Checkbox(value=False,
description='estimate',
disabled=False, indent=False),
flag_err_ = widgets.Checkbox(value=False,
description='estimator confidence intervals',
disabled=False, indent=False))
def stochastic_system(T, tau, process_noise, measurement_noise, flag_m, flag_s_, flag_err_):
t = np.arange(0, T_max, 1) # timeline
s = np.zeros(T_max) # states
D = np.exp(-1/tau) # dynamics multiplier (matrix if s is vector)
process_noise_cov = process_noise**2
measurement_noise_cov = measurement_noise**2
prior_mean = 0
prior_cov = process_noise_cov/(1-D**2)
s[0] = np.sqrt(prior_cov) * unit_process_noise[0] # Sample initial condition from equilibrium distribution
m = np.zeros(T_max) # measurement
s_ = np.zeros(T_max) # estimate (posterior mean)
cov_ = np.zeros(T_max) # uncertainty (posterior covariance)
s_[0] = prior_mean
cov_[0] = prior_cov
posterior = gaussian(prior_mean, prior_cov)
captured_prior = None
captured_likelihood = None
captured_posterior = None
onfilter = True
for i in range(1, T_max):
s[i] = D * s[i-1] + process_noise * unit_process_noise[i-1]
if onfilter:
m[i] = s[i] + measurement_noise * unit_measurement_noise[i]
prior, likelihood, posterior = filter(D, process_noise_cov, measurement_noise_cov, posterior, m[i])
s_[i] = posterior.mean
cov_[i] = posterior.cov
if i == T:
onfilter = False
captured_prior = prior
captured_likelihood = likelihood
captured_posterior = posterior
smin = min(min(m),min(s-2*np.sqrt(cov_[-1])),min(s_-2*np.sqrt(cov_[-1])))
smax = max(max(m),max(s+2*np.sqrt(cov_[-1])),max(s_+2*np.sqrt(cov_[-1])))
pscale = 0.2 # scaling factor for displaying pdfs
fig = plt.figure(figsize=[15, 10])
ax = plt.subplot(2, 1, 1)
ax.set_xlabel('time')
ax.set_ylabel('state')
ax.set_xlim([0, T_max+(T_max*pscale)])
ax.set_ylim([smin, smax])
show_pdf = [False, False]
ax.plot(t[:T+1], s[:T+1], color='limegreen', lw=2)
ax.plot(t[T:], s[T:], color='limegreen', lw=2, alpha=0.3)
ax.plot([t[T:T+1]], [s[T:T+1]], marker='o', markersize=8, color='limegreen')
if flag_m:
ax.plot(t[:T+1], m[:T+1], '.', color='crimson', lw=2)
ax.plot([t[T:T+1]], [m[T:T+1]], marker='o', markersize=8, color='crimson')
domain = np.linspace(ax.get_ylim()[0], ax.get_ylim()[1], 500)
pdf_likelihood = norm.pdf(domain, captured_likelihood.mean, np.sqrt(captured_likelihood.cov))
ax.fill_betweenx(domain, T + pdf_likelihood*(T_max*pscale), T, color='crimson', alpha=0.5, label='likelihood', edgecolor="crimson", linewidth=0)
ax.plot(T + pdf_likelihood*(T_max*pscale), domain, color='crimson', linewidth=2.0)
ax.legend(ncol=3, loc='upper left')
show_pdf[0] = True
if flag_s_:
ax.plot(t[:T+1], s_[:T+1], color='black', lw=2)
ax.plot([t[T:T+1]], [s_[T:T+1]], marker='o', markersize=8, color='black')
show_pdf[1] = True
if flag_err_:
ax.fill_between(t[:T+1], s_[:T+1] + 2 * np.sqrt(cov_)[:T+1], s_[:T+1] - 2 * np.sqrt(cov_)[:T+1], color='black', alpha=0.3)
show_pdf[1] = True
if show_pdf[1]:
domain = np.linspace(ax.get_ylim()[0], ax.get_ylim()[1], 500)
pdf_post = norm.pdf(domain, captured_posterior.mean, np.sqrt(captured_posterior.cov))
ax.fill_betweenx(domain, T + pdf_post*(T_max*pscale), T, color='black', alpha=0.5, label='posterior', edgecolor="black", linewidth=0)
ax.plot(T + pdf_post*(T_max*pscale), domain, color='black', linewidth=2.0)
ax.legend(ncol=3, loc='upper left')
if show_pdf[0] and show_pdf[1]:
domain = np.linspace(ax.get_ylim()[0], ax.get_ylim()[1], 500)
pdf_prior = norm.pdf(domain, captured_prior.mean, np.sqrt(captured_prior.cov))
ax.fill_betweenx(domain, T + pdf_prior*(T_max*pscale), T, color='dodgerblue', alpha=0.5, label='prior', edgecolor="dodgerblue", linewidth=0)
ax.plot(T + pdf_prior*(T_max*pscale), domain, color='dodgerblue', linewidth=2.0)
ax.legend(ncol=3, loc='upper left')
plt.show()
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_The_Kalman_filter_in_action_Interactive_Demo")
Video 9: Interactive Demo 2.1 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Interactive_Demo_2.1_Discussion_Video")
Video 10: Implementing a Kalman filter#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implementing_a_Kalman_filter_Video")
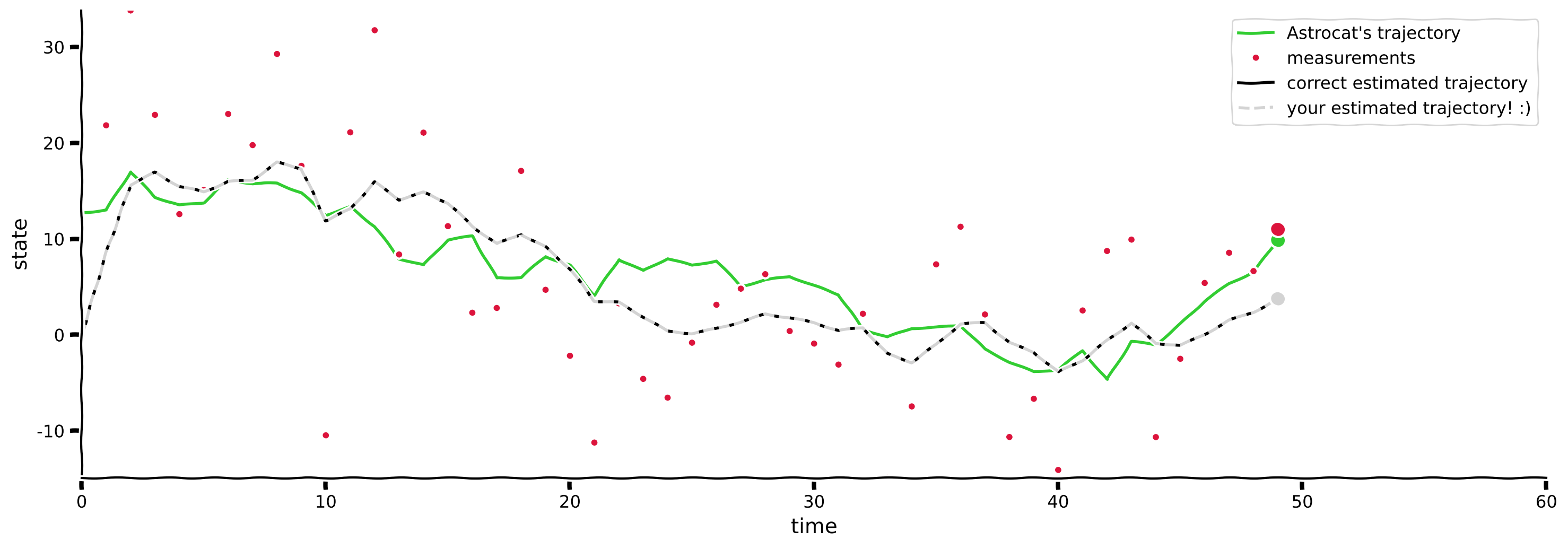
Coding Exercise 2.1: Implement your own Kalman filter#
As you saw in the video and the previous exercise, a Kalman filter estimates a posterior probability distribution recursively over time using a mathematical model of the process and incoming measurements. This dynamic posterior allows us to improve our guess about Astrocat’s position as new measures arrive; besides, its mean is the best estimate one can compute of Astrocat’s actual position at each time step.
Now it’s your turn! Follow this recipe to complete the code below and implement your own Kalman filter:
Step 1: Change yesterday’s posterior into today’s prior
Use the mathematical model to calculate how deterministic changes in the process shift yesterday’s posterior, \(\mathcal{N}(\mu_{s_{t-1}}, \sigma_{s_{t-1}}^2)\), and how random changes in the process broaden the shifted distribution:
(383)#\[\begin{equation} p(s_t|m_{1:t-1}) = p(Ds_{t-1}+w_{t-1} | m_{1:t-1}) = \mathcal{N}(D\mu_{s_{t-1}} + 0, D^2\sigma_{s_{t-1}}^2 +\sigma_p^2) \end{equation}\]
Note that we use \(\sigma_p\) here to denote the process noise, while the video used \(\sigma_w\) (a change in notation to sync with the prior sections).
Step 2: Multiply today’s prior by likelihood
Use the latest measurement of Astrocat’s collar (fresh evidence) to form a new estimate somewhere between this measurement and what we predicted in Step 1. The next posterior is the result of multiplying the Gaussian computed in Step 1 (a.k.a. today’s prior) and the likelihood, which is also modeled as a Gaussian \(\mathcal{N}(m_t, \sigma_m^2)\):
2a: add information from prior and likelihood
To find the posterior variance, we first compute the posterior information (which is the inverse of the variance) by adding the information provided by the prior and the likelihood:
(384)#\[\begin{equation} \frac{1}{\sigma_{s_t}^2} = \frac{1}{D^2\sigma_{s_{t-1}}^2 +\sigma_p^2} + \frac{1}{\sigma_m^2} \end{equation}\]
Now we can take the inverse of the posterior information to get back the posterior variance.
2b: add means from prior and likelihood
To find the posterior mean, we calculate a weighted average of means from prior and likelihood, where each weight, \(g\), is just the fraction of information that each Gaussian provides!
(385)#\[\begin{align} g_{\rm{prior}} &= \frac{\rm{information}_{\textit{ }\rm{prior}}}{\rm{information}_{\textit{ }\rm{posterior}}} \\ g_{\rm{likelihood}} &= \frac{\rm{information}_{\textit{ }\rm{likelihood}}}{\rm{information}_{\textit{ }\rm{posterior}}} \\ \bar{\mu}_t &= g_{\rm{prior}} D\mu_{s_{t-1}} + g_{\rm{likelihood}} m_t \end{align}\]
Congrats!
Implementation detail: You can access the statistics of a Gaussian by typing, e.g.,
prior.mean
prior.cov
Optional: Relationship to classic description of Kalman filter:
We’re teaching this recipe because it is interpretable and connects to past lessons about the sum rule and product rule for Gaussians. But the classic description of the Kalman filter is a little different. The above weights, \(g_{\rm{prior}}\) and \(g_{\rm{likelihood}}\), add up to \(1\) and can be written one in terms of the other; then, if we let \(K = g_{\rm{likelihood}}\), the posterior mean can be expressed as:
In classic textbooks, you will often find this expression for the posterior mean; \(K\) is known as the Kalman gain and its function is to choose a value partway between the current measurement \(m_t\) and the prediction from Step 1.
# Set random seed
np.random.seed(0)
# Set parameters
T = 50 # Time duration
tau = 25 # dynamics time constant
process_noise = 2 # process noise in Astrocat's propulsion unit (standard deviation)
measurement_noise = 9 # measurement noise in Astrocat's collar (standard deviation)
# Auxiliary variables
process_noise_cov = process_noise**2 # process noise in Astrocat's propulsion unit (variance)
measurement_noise_cov = measurement_noise**2 # measurement noise in Astrocat's collar (variance)
# Initialize arrays
t = np.arange(0, T, 1) # timeline
s = np.zeros(T) # states
D = np.exp(-1/tau) # dynamics multiplier (matrix if s is vector)
m = np.zeros(T) # measurement
s_ = np.zeros(T) # estimate (posterior mean)
cov_ = np.zeros(T) # uncertainty (posterior covariance)
# Initial guess of the posterior at time 0
initial_guess = gaussian(0, process_noise_cov/(1-D**2)) # In this case, the initial guess (posterior distribution
# at time 0) is the equilibrium distribution, but feel free to
# experiment with other gaussians
posterior = initial_guess
# Sample initial conditions
s[0] = posterior.mean + np.sqrt(posterior.cov) * np.random.randn() # Sample initial condition from posterior distribution at time 0
s_[0] = posterior.mean
cov_[0] = posterior.cov
# Loop over steps
for i in range(1, T):
# Sample true states and corresponding measurements
s[i] = D * s[i-1] + np.random.normal(0, process_noise) # variable `s` records the true position of Astrocat
m[i] = s[i] + np.random.normal(0, measurement_noise) # variable `m` records the measurements of Astrocat's collar
###################################################################
## Fill out the following then remove
raise NotImplementedError("Student exercise: need to implement the Kalman filter")
###################################################################
# Step 1. Shift yesterday's posterior to match the deterministic change of the system's dynamics,
# and broad it to account for the random change (i.e., add mean and variance of process noise).
todays_prior = ...
# Step 2. Now that yesterday's posterior has become today's prior, integrate new evidence
# (i.e., multiply gaussians from today's prior and likelihood)
likelihood = ...
# Step 2a: To find the posterior variance, add information (inverse variances) of prior and likelihood
info_prior = 1/todays_prior.cov
info_likelihood = 1/likelihood.cov
info_posterior = ...
# Step 2b: To find the posterior mean, calculate a weighted average of means from prior and likelihood;
# the weights are just the fraction of information that each gaussian provides!
prior_weight = info_prior / info_posterior
likelihood_weight = info_likelihood / info_posterior
posterior_mean = ...
# Don't forget to convert back posterior information to posterior variance!
posterior_cov = 1/info_posterior
posterior = gaussian(posterior_mean, posterior_cov)
s_[i] = posterior.mean
cov_[i] = posterior.cov
# Visualize
paintMyFilter(D, initial_guess, process_noise_cov, measurement_noise_cov, s, m, s_, cov_)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_your_own_Kalman_filter_Exercise")
Video 11: Exercise 2.1 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Exercise_2.1_Discussion_Video")
Section 2.2: Estimation accuracy#
Estimated timing to here from start of tutorial: 50 min
Video 12: Compare states, estimates, and measurements#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Compare_states_estimates_and_measurements_Video")
Interactive Demo 2.2: Compare states, estimates, and measurements#
How well do the estimates \(\hat{s}\) match the actual values \(s\)? How does the distribution of errors \(\hat{s}_t - s_t\) compare to the posterior variance? Why? Try different parameters of the Hidden Markov Model and observe how the properties change.
How do the measurements \(m\) compare to the true states?
Execute cell to enable the demo
Show code cell source
# @markdown Execute cell to enable the demo
display(HTML('''<style>.widget-label { min-width: 15ex !important; }</style>'''))
@widgets.interact(tau=widgets.FloatSlider(tau_max/2, description='tau',
min=tau_min, max=tau_max),
process_noise=widgets.FloatSlider(2,
description="process noise",
min=process_noise_min,
max=process_noise_max),
measurement_noise=widgets.FloatSlider(3,
description="observation noise",
min=measurement_noise_min,
max=measurement_noise_max),
flag_m = widgets.Checkbox(value=False,
description='measurements',
disabled=False, indent=False))
def stochastic_system(tau, process_noise, measurement_noise, flag_m):
T = T_max
t = np.arange(0, T_max, 1) # timeline
s = np.zeros(T_max) # states
D = np.exp(-1/tau) # dynamics multiplier (matrix if s is vector)
process_noise_cov = process_noise**2 # process noise in Astrocat's propulsion unit (variance)
measurement_noise_cov = measurement_noise**2 # measurement noise in Astrocat's collar (variance)
prior_mean = 0
prior_cov = process_noise_cov/(1-D**2)
s[0] = np.sqrt(prior_cov) * np.random.randn() # Sample initial condition from equilibrium distribution
m = np.zeros(T_max) # measurement
s_ = np.zeros(T_max) # estimate (posterior mean)
cov_ = np.zeros(T_max) # uncertainty (posterior covariance)
s_[0] = prior_mean
cov_[0] = prior_cov
posterior = gaussian(prior_mean, prior_cov)
for i in range(1, T):
s[i] = D * s[i-1] + process_noise * np.random.randn()
m[i] = s[i] + measurement_noise * np.random.randn()
prior, likelihood, posterior = filter(D, process_noise_cov,
measurement_noise_cov,
posterior, m[i])
s_[i] = posterior.mean
cov_[i] = posterior.cov
fig = plt.figure(figsize=[10, 5])
ax = plt.subplot(1, 2, 1)
ax.set_xlabel('s')
ax.set_ylabel('$\mu$')
sbounds = 1.1*max(max(np.abs(s)), max(np.abs(s_)), max(np.abs(m)))
ax.plot([-sbounds, sbounds], [-sbounds, sbounds], 'k') # plot line of equality
ax.errorbar(s, s_, yerr=2*np.sqrt(cov_[-1]), marker='.',
mfc='black', mec='black', linestyle='none', color='gray')
axhist = plt.subplot(1, 2, 2)
axhist.set_xlabel('error $s-\hat{s}$')
axhist.set_ylabel('probability')
axhist.hist(s-s_, density=True, bins=25, alpha=.5,
label='histogram of estimate errors', color='yellow')
if flag_m:
ax.plot(s, m, marker='.', linestyle='none', color='red')
axhist.hist(s - m, density=True, bins=25, alpha=.5,
label='histogram of measurement errors', color='orange')
domain = np.arange(-sbounds, sbounds, 0.1)
pdf_g = norm.pdf(domain, 0, np.sqrt(cov_[-1]))
axhist.fill_between(domain, pdf_g, color='black',
alpha=0.5, label='posterior shifted to mean')
axhist.legend()
plt.show()
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Compare_states_estimates_and_measurements_Interactive_Demo")
Video 13: Interactive Demo 2.2 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Interactive_Demo_2.2_Discussion_Video")
Section 2.3: Searching for Astrocat#
Estimated timing to here from start of tutorial: 1 hour
Video 14: How long does it take to find astrocat?#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_How_long_does_it_take_to_find_astrocat_Video")
Interactive Demo 2.3: How long does it take to find astrocat?#
Here we plot the posterior variance as a function of time. Before mission control gets measurements, their only information about astrocat’s location is the prior. After some measurements, they hone in on astrocat.
How does the variance shrink with time?
The speed depends on the process dynamics, but does it also depend on the signal-to-noise ratio (SNR)? (Here we measure SNR in decibels, a log scale where 1 dB means 0.1 log unit.)
The red curve shows how rapidly the latent variance equilibrates exponentially from an initial condition, with a time constant of \(\sim 1/(1-D^2)\). (Note: We adjusted the curve by shifting and scaling so it lines up visually with the posterior equilibrium variance. This makes it easier to compare timescales.) Does the latent process converge faster or slower than the posterior? Can you explain this based on how the Kalman filter integrates evidence?
Execute this cell to enable the demo
Show code cell source
# @markdown Execute this cell to enable the demo
display(HTML('''<style>.widget-label { min-width: 15ex !important; }</style>'''))
@widgets.interact(T=widgets.IntSlider(tau_max, description="max time",
min=2, max=T_max-1),
tau=widgets.FloatSlider(tau_max/2,
description='time constant',
min=tau_min, max=tau_max),
SNRdB=widgets.FloatSlider(-20.,
description="SNR (decibels)",
min=-40., max=10.))
def stochastic_system(T, tau, SNRdB):
t = np.arange(0, T, 1) # timeline
s = np.zeros(T) # states
D = np.exp(-1/tau) # dynamics matrix (scalar here)
prior_mean = 0
process_noise = 1
SNR = 10**(.1*SNRdB)
measurement_noise = process_noise / SNR
prior_cov = process_noise/(1-D**2)
s[0] = np.sqrt(prior_cov) * unit_process_noise[0] # Sample initial condition from equilibrium distribution
m = np.zeros(T) # measurements
s_ = np.zeros(T) # estimates (posterior mean)
cov_ = np.zeros(T) # uncertainty (posterior covariance)
pcov = np.zeros(T) # process covariance
s_[0] = prior_mean
cov_[0] = prior_cov
posterior = gaussian(prior_mean, prior_cov)
for i in range(1, T):
s[i] = D * s[i-1] + np.sqrt(process_noise) * unit_process_noise[i-1]
m[i] = s[i] + np.sqrt(measurement_noise) * unit_measurement_noise[i]
prior, likelihood, posterior = filter(D, process_noise,
measurement_noise, posterior, m[i])
s_[i] = posterior.mean
cov_[i] = posterior.cov
pcov[i] = D**2 * pcov[i-1] + process_noise
equilibrium_posterior_var = process_noise * (D**2 - 1 - SNR + np.sqrt((D**2 - 1 - SNR)**2 + 4 * D**2 * SNR)) / (2 * D**2 * SNR)
equilibrium_process_var = process_noise / (1-D**2)
scale = (max(cov_) - equilibrium_posterior_var) / equilibrium_process_var
pcov = pcov * scale # scale for better visual comparison of temporal structure
fig, ax = plt.subplots()
ax.set_xlabel('time')
ax.set_xlim([0, T])
ax.fill_between(t, 0, cov_, color='black', alpha=0.3)
ax.plot(t, cov_, color='black', label='posterior variance')
ax.set_ylabel('posterior variance')
ax.set_ylim([0, max(cov_)])
ax2 = ax.twinx() # instantiate a second axes that shares the same x-axis
ax2.fill_between(t, min(pcov), pcov, color='red', alpha=0.3)
ax2.plot(t, pcov, color='red', label='hidden process variance')
ax2.set_ylabel('hidden process variance (scaled)', color='red',
rotation=-90, labelpad=20)
ax2.tick_params(axis='y', labelcolor='red')
# ax2.yaxis.set_major_formatter(plt.FuncFormatter(format_func))
ax2.set_yticks([0, equilibrium_process_var - equilibrium_posterior_var])
ax2.set_yticklabels(['0', 'equilibrium\nprocess var'])
ax2.set_ylim([max(cov_), 0])
fig.tight_layout() # otherwise the right y-label is slightly clipped
plt.show()
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_How_long_does_it_take_to_find_astrocat_Interactive_Demo")
Video 15: Interactive Demo 2.3 Discussion#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Interactive_Demo_2.3_Discussion_Video")
Applications of Kalman filter in brain science
Brain-Computer Interface: estimate intended movements using neural activity as measurements.
Data analysis: estimate brain activity from noisy measurements (e.g., EEG)
Model of perception: prey tracking using noisy sensory measurements
Imagine your own! When are you trying to estimate something you cannot see directly?
There are many variants that improve upon the limitations of the Kalman filter: non-Gaussian states and measurements, nonlinear dynamics, and more.
Summary#
Estimated timing of tutorial: 1 hour, 15 minutes
In this tutorial, you:
simulated a 1D continuous linear dynamical system and took noisy measurements of the hidden state
used a Kalman filter to recover the hidden states more accurately than if you just used the noisy measurements and connected this to Bayesian ideas
played around with parameters of the process to better understand Kalman filter behavior