![]()

Tutorial 3: Numerical Methods#
Week 0, Day 3: Calculus
Content creators: John S Butler, Arvind Kumar with help from Harvey McCone
Content reviewers: Swapnil Kumar, Matthew McCann
Production editors: Matthew McCann, Ella Batty
Tutorial Objectives#
Estimated timing of tutorial: 70 minutes
While a great deal of neuroscience can be described by mathematics, a great deal of the mathematics used cannot be solved exactly. This might seem very odd that you can writing something in mathematics that cannot be immediately solved but that is the beauty and mystery of mathematics. To side step this issue we use Numerical Methods to estimate the solution.
In this tutorial, we will look at the Euler method to estimate the solution of a few different differential equations: the population equation, the Leaky Integrate and Fire model and a simplified version of the Wilson-Cowan model which is a system of differential equations.
Steps:
Code the Euler estimate of the Population Equation;
Investigate the impact of time step on the error of the numerical solution;
Code the Euler estimate of the Leaky Integrate and Fire model for a constant input;
Visualize and listen to the response of the integrate for different inputs;
Apply the Euler method to estimate the solution of a system of differential equations.
Setup#
Install and import feedback gadget#
Show code cell source
# @title Install and import feedback gadget
!pip3 install vibecheck datatops --quiet
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch-precourse",
"user_key": "8zxfvwxw",
},
).render()
feedback_prefix = "W0D4_T3"
# Imports
import numpy as np
import matplotlib.pyplot as plt
Figure Settings#
Show code cell source
# @title Figure Settings
import logging
logging.getLogger('matplotlib.font_manager').disabled = True
import IPython.display as ipd
from matplotlib import gridspec
import ipywidgets as widgets # interactive display
from ipywidgets import Label
%config InlineBackend.figure_format = 'retina'
# use NMA plot style
plt.style.use("https://raw.githubusercontent.com/NeuromatchAcademy/content-creation/main/nma.mplstyle")
my_layout = widgets.Layout()
Plotting Functions#
Show code cell source
# @title Plotting Functions
time = np.arange(0, 1, 0.01)
def plot_slope(dt):
"""
Args:
dt : time-step
Returns:
A figure of an exponential, the slope of the exponential and the derivative exponential
"""
t = np.arange(0, 5+0.1/2, 0.1)
with plt.xkcd():
fig = plt.figure(figsize=(6, 4))
# Exponential
p = np.exp(0.3*t)
plt.plot(t, p, label='y')
# slope
plt.plot([1, 1+dt], [np.exp(0.3*1), np.exp(0.3*(1+dt))],':og',label=r'$\frac{y(1+\Delta t)-y(1)}{\Delta t}$')
# derivative
plt.plot([1, 1+dt], [np.exp(0.3*1), np.exp(0.3*(1))+dt*0.3*np.exp(0.3*(1))],'-k',label=r'$\frac{dy}{dt}$')
plt.legend()
plt.plot(1+dt, np.exp(0.3*(1+dt)), 'og')
plt.ylabel('y')
plt.xlabel('t')
plt.show()
def plot_StepEuler(dt):
"""
Args:
dt : time-step
Returns:
A figure of one step of the Euler method for an exponential growth function
"""
t=np.arange(0, 1 + dt + 0.1 / 2, 0.1)
with plt.xkcd():
fig = plt.figure(figsize=(6,4))
p=np.exp(0.3*t)
plt.plot(t,p)
plt.plot([1,],[np.exp(0.3*1)],'og',label='Known')
plt.plot([1,1+dt],[np.exp(0.3*1),np.exp(0.3*(1))+dt*0.3*np.exp(0.3*1)],':g',label=r'Euler')
plt.plot(1+dt,np.exp(0.3*(1))+dt*0.3*np.exp(0.3*1),'or',label=r'Estimate $p_1$')
plt.plot(1+dt,p[-1],'bo',label=r'Exact $p(t_1)$')
plt.vlines(1+dt,np.exp(0.3*(1))+dt*0.3*np.exp(0.3*1),p[-1],colors='r', linestyles='dashed',label=r'Error $e_1$')
plt.text(1+dt+0.1,(np.exp(0.3*(1))+dt*0.3*np.exp(0.3*1)+p[-1])/2,r'$e_1$')
plt.legend()
plt.ylabel('Population (millions)')
plt.xlabel('time(years)')
plt.show()
def visualize_population_approx(t, p):
fig = plt.figure(figsize=(6, 4))
plt.plot(t, np.exp(0.3*t), 'k', label='Exact Solution')
plt.plot(t, p,':o', label='Euler Estimate')
plt.vlines(t, p, np.exp(0.3*t),
colors='r', linestyles='dashed', label=r'Error $e_k$')
plt.ylabel('Population (millions)')
plt.legend()
plt.xlabel('Time (years)')
plt.show()
## LIF PLOT
def plot_IF(t, V, I, Spike_time):
"""
Args:
t : time
V : membrane Voltage
I : Input
Spike_time : Spike_times
Returns:
figure with three panels
top panel: Input as a function of time
middle panel: membrane potential as a function of time
bottom panel: Raster plot
"""
with plt.xkcd():
fig = plt.figure(figsize=(12,4))
gs = gridspec.GridSpec(3, 1, height_ratios=[1, 4, 1])
# PLOT OF INPUT
plt.subplot(gs[0])
plt.ylabel(r'$I_e(nA)$')
plt.yticks(rotation=45)
plt.plot(t,I,'g')
#plt.ylim((2,4))
plt.xlim((-50,1000))
# PLOT OF ACTIVITY
plt.subplot(gs[1])
plt.plot(t,V,':')
plt.xlim((-50,1000))
plt.ylabel(r'$V(t)$(mV)')
# PLOT OF SPIKES
plt.subplot(gs[2])
plt.ylabel(r'Spike')
plt.yticks([])
plt.scatter(Spike_time,1*np.ones(len(Spike_time)), color="grey", marker=".")
plt.xlim((-50,1000))
plt.xlabel('time(ms)')
plt.show()
def plot_rErI(t, r_E, r_I):
"""
Args:
t : time
r_E : excitation rate
r_I : inhibition rate
Returns:
figure of r_I and r_E as a function of time
"""
with plt.xkcd():
fig = plt.figure(figsize=(6,4))
plt.plot(t,r_E,':',color='b',label=r'$r_E$')
plt.plot(t,r_I,':',color='r',label=r'$r_I$')
plt.xlabel('time(ms)')
plt.legend()
plt.ylabel('Firing Rate (Hz)')
plt.show()
def plot_rErI_Simple(t, r_E, r_I):
"""
Args:
t : time
r_E : excitation rate
r_I : inhibition rate
Returns:
figure with two panels
left panel: r_I and r_E as a function of time
right panel: r_I as a function of r_E with Nullclines
"""
with plt.xkcd():
fig = plt.figure(figsize=(12,4))
gs = gridspec.GridSpec(1, 2)
# LEFT PANEL
plt.subplot(gs[0])
plt.plot(t,r_E,':',color='b',label=r'$r_E$')
plt.plot(t,r_I,':',color='r',label=r'$r_I$')
plt.xlabel('time(ms)')
plt.legend()
plt.ylabel('Firing Rate (Hz)')
# RIGHT PANEL
plt.subplot(gs[1])
plt.plot(r_E,r_I,'k:')
plt.plot(r_E[0],r_I[0],'go')
plt.hlines(0,np.min(r_E),np.max(r_E),linestyles="dashed",color='b',label=r'$\frac{d}{dt}r_E=0$')
plt.vlines(0,np.min(r_I),np.max(r_I),linestyles="dashed",color='r',label=r'$\frac{d}{dt}r_I=0$')
plt.legend(loc='upper left')
plt.xlabel(r'$r_E$')
plt.ylabel(r'$r_I$')
plt.show()
def plot_rErI_Matrix(t, r_E, r_I, Null_rE, Null_rI):
"""
Args:
t : time
r_E : excitation firing rate
r_I : inhibition firing rate
Null_rE: Nullclines excitation firing rate
Null_rI: Nullclines inhibition firing rate
Returns:
figure with two panels
left panel: r_I and r_E as a function of time
right panel: r_I as a function of r_E with Nullclines
"""
with plt.xkcd():
fig = plt.figure(figsize=(12,4))
gs = gridspec.GridSpec(1, 2)
plt.subplot(gs[0])
plt.plot(t,r_E,':',color='b',label=r'$r_E$')
plt.plot(t,r_I,':',color='r',label=r'$r_I$')
plt.xlabel('time(ms)')
plt.ylabel('Firing Rate (Hz)')
plt.legend()
plt.subplot(gs[1])
plt.plot(r_E,r_I,'k:')
plt.plot(r_E[0],r_I[0],'go')
plt.plot(r_E,Null_rE,':',color='b',label=r'$\frac{d}{dt}r_E=0$')
plt.plot(r_E,Null_rI,':',color='r',label=r'$\frac{d}{dt}r_I=0$')
plt.legend(loc='best')
plt.xlabel(r'$r_E$')
plt.ylabel(r'$r_I$')
plt.show()
Section 1: Intro to the Euler method using the population differential equation#
Video 1: Intro to numerical methods for differential equations#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Intro_to_numerical_methods_for_differential_equations_Video")
Section 1.1: Slope of line as approximation of derivative#
Estimated timing to here from start of tutorial: 8 min
Click here for text recap of relevant part of video
The Euler method is one of the straight forward and elegant methods to approximate a differential. It was designed by Leonhard Euler (1707-1783). Simply put we just replace the derivative in the differential equation by the formula for a line and re-arrange.
The slope is the rate of change between two points. The formula for the slope of a line between the points \((t_0,y(t_0))\) and \((t_1,y(t_1))\) is given by: $\( m=\frac{y(t_1)-y(t_0)}{t_1-t_0}, \)\( which can be written as \)\( m=\frac{y_1-y_0}{t_1-t_0}, \)\( or as \)\( m=\frac{\Delta y_0}{\Delta t_0}, \)\( where \)\Delta y_0=y_1-y_0\( and \)\Delta t_0=t_1-t_0\( or in words as \)\( m=\frac{\text{ Change in y} }{\text{Change in t}}. \)\( The slope can be used as an approximation of the derivative such that \)\( \frac{d}{dt}y(t)\approx \frac{y(t_0+\Delta t)-y(t_0)}{t_0+\Delta t-t_0}=\frac{y(t_0+dt)-y(t_0)}{\Delta t}\)\( where \)\Delta t$ is a time-step.
Interactive Demo 1.1: Slope of a Line#
The plot below shows a function \(y(t)\) in blue, its exact derivative \( \frac{d}{dt}y(t)\) at \(t_0=1\) in black. The approximate derivative is calculated using the slope formula \(=\frac{y(1+\Delta t)-y(1)}{\Delta t}\) for different time-steps sizes \(\Delta t\) in green.
Interact with the widget to see how time-step impacts the slope’s accuracy, which is the derivative’s estimate.
How does the size of \(\Delta t\) affect the approximation?
Make sure you execute this cell to enable the widget!
Show code cell source
# @markdown Make sure you execute this cell to enable the widget!
my_layout.width = '450px'
@widgets.interact(
dt=widgets.FloatSlider(1, min=0., max=4., step=.1,
layout=my_layout)
)
def Pop_widget(dt):
plot_slope(dt)
plt.show()
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Slope_of_a_line_Interactive_Demo")
Section 1.2: Euler error for a single step#
Estimated timing to here from start of tutorial: 12 min
Click here for text recap of relevant part of video
Linking with the previous tutorial, we will use the population differential equation to get an intuitive feel of using the Euler method to approximate the solution of a differential equation, as it has an exact solution with no discontinuities.
The population differential equation is given by
where \(p(t)\) is the population at time \(t\) and \(\alpha\) is a parameter representing birth rate. The exact solution of the differential equation is $\( p(t)=p_0e^{\alpha t}.\)$
To numerically estimate the population differential equation we replace the derivate with the slope of the line to get the discrete (not continuous) equation:
where \(p_1\) is the estimate of \(p(t_1)\). Let \(\Delta t=t_1-t_0\) be the time-step and re-arrange the equation gives
where \(\color{red}{p_1}\) is the unknown future, \(\color{green}{p_0}\) is the known current population, \(\color{blue}{\Delta t}\) is the chosen time-step parameter and \(\color{blue}{\alpha}\) is the given birth rate parameter. Another way to read the re-arranged discrete equation is:
So pretty much, we can use the current population and add a bit of the dynamics of the differential equation to predict the future. We will make millions… But wait there is always an error.
The solution of the Euler method \(p_1\) is an estimate of the exact solution \(p(t_1)\) at \(t_1\) which means there is a bit of error \(e_1\) which gives the equation
Most of the time we do not know the exact answer \(p(t_1)\) and hence the size of the error \(e_1\) but for the population equation we have the exact solution \( p(t)=p_0e^{\alpha}.\)
This means we can explore what the error looks like.
Interactive Demo 1.2: Euler error for a single step#
Interact with the widget to see how the time-step \(\Delta t\), dt in code, impacts the estimate \(p_1\) and the error \(e_1\) of the Euler method.
What happens to the estimate \(p_1\) as the time-step \(\Delta t\) increases?
Is there a relationship between the size of \(\Delta t\) and \(e_1\)?
How would you improve the error \(e_1\)?
Make sure you execute this cell to enable the widget!
Show code cell source
# @markdown Make sure you execute this cell to enable the widget!
my_layout.width = '450px'
@widgets.interact(
dt=widgets.FloatSlider(1.5, min=0., max=4., step=.1,
layout=my_layout)
)
def Pop_widget(dt):
plot_StepEuler(dt)
plt.show()
The error \(e_1\) from one time-step is known as the local error. For the Euler method, the local error is linear, which means that the error decreases linearly as a function of timestep and is written as \(\mathcal{O}(\Delta t)\).
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Euler_error_of_single_step_Interactive_Demo")
Section 1.3: Taking more steps#
Estimated timing to here from start of tutorial: 16 min
Video 2: Taking more steps#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Taking_more_steps_Video")
Click here for text recap of relevant part of video
In the above exercise we saw that by increasing the time-step \(\Delta t\) the error between the estimate \(p_1\) and the exact \(p(t_1)\) increased. The largest error in the example above was for \(\Delta t=4\), meaning the first time point was at 1 year and the second was at 5 years (as 5 - 1 = 4).
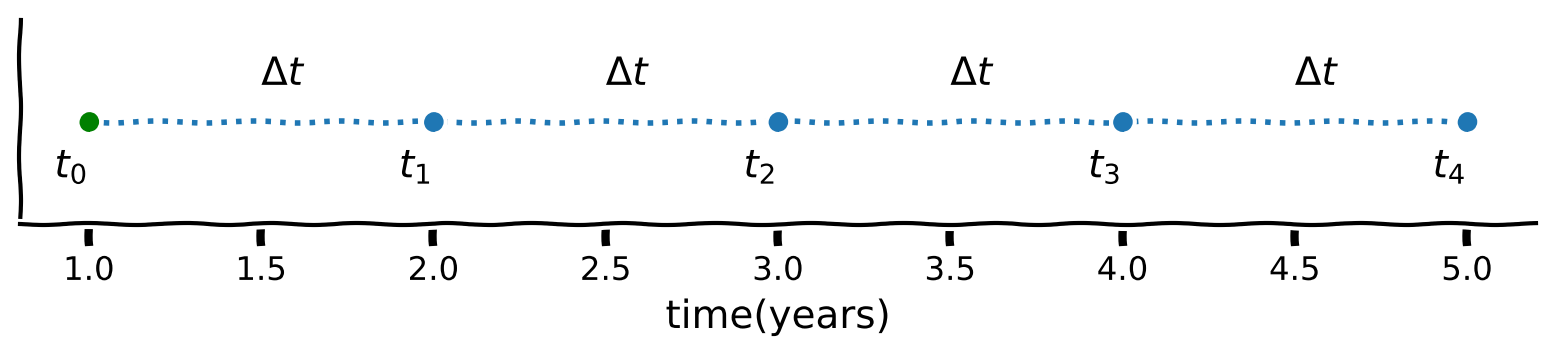
To decrease the error, we can divide the interval \([1, 5]\) into more steps using a smaller \(\Delta t\).
In the plot below we use \(\Delta t=1\), which divides the interval into four segments $\(n=\frac{5-1}{1}=4,\)\( giving \)\( t_0=t[0]=1, \ t_1=t[1]=2, \ t_2=t[2]=3, \ t_3=t[3]=4 \ \text{ and } t_4=t[4]=5. \)\( This can be written as \)\( t[k]=1+k\times1, \text{ for } k=0,\cdots 4, \)\( and more generally as \)\( t[k]=t[k]+k\times \Delta t, \text{ for } k=0,\cdots n, \)\( where \)n$ is the number of steps.
Using the Euler method, the continuous population differential equation is written as a series of discrete difference equations of the form:
where \(\color{red}{p[k+1]}\) is the unknown estimate of the future population at \(t[k+1]\), \(\color{green}{p[k]}\) is the known current population estimate at \(t_k\), \(\color{blue}{\Delta t}\) is the chosen time-step parameter and \(\color{blue}{\alpha}\) is the given birth rate parameter.
The Euler method can be applied to all first order differential equations of the form
on an interval \([a,b]\).
Using the Euler method all differential equation can be written as discrete difference equations:
where \(\color{red}{y[k+1]}\) is the unknown estimate at \(t[k+1]\), \(\color{green}{y[k]}\) is the known at \(t_k\), \(\color{blue}{\Delta t}\) is the chosen time-step parameter, \(\color{blue}{t[k]}\) is the time point and \(f\) is the right hand side of the differential equation. The discrete time steps are:
Once again this can be simply put into words:
Execute this cell to visualize time steps
Show code cell source
# @markdown *Execute this cell to visualize time steps*
dt =1
t =np.arange(1, 5+dt/2, dt) # Time from 1 to 5 years in 0.1 steps
with plt.xkcd():
fig = plt.figure(figsize=(8, 2))
plt.plot(t, 0*t, ':o')
plt.plot(t[0] ,0*t[0],':go',label='Initial Condition')
plt.text(t[0]-0.1, 0*t[0]-0.03, r'$t_0$')
plt.text(t[1]-0.1, 0*t[0]-0.03, r'$t_1$')
plt.text(t[2]-0.1, 0*t[0]-0.03, r'$t_2$')
plt.text(t[3]-0.1, 0*t[0]-0.03, r'$t_3$')
plt.text(t[4]-0.1, 0*t[0]-0.03,r'$t_4$')
plt.text(t[0]+0.5, 0*t[0]+0.02, r'$\Delta t$')
plt.text(t[1]+0.5, 0*t[0]+0.02, r'$\Delta t$')
plt.text(t[2]+0.5, 0*t[0]+0.02, r'$\Delta t$')
plt.text(t[3]+0.5, 0*t[0]+0.02, r'$\Delta t$')
plt.yticks([])#plt.ylabel('Population (millions)')
plt.xlabel('time(years)')
plt.show()
Coding Exercise 1.3: Step, step, step#
Given the population differential equation:
and the initial condition:
code the difference equation:
to estimate the population on the interval \([1,5]\) with a time-step \(\Delta t=1\), denoted by dt in code.
# Time step
dt = 1
# Make time range from 1 to 5 years with step size dt
t = np.arange(1, 5+dt/2, dt)
# Get number of steps
n = len(t)
# Initialize p array
p = np.zeros(n)
p[0] = np.exp(0.3*t[0]) # initial condition
# Loop over steps
for k in range(n-1):
########################################################################
## TODO for students
## Complete line of code and remove
raise NotImplementedError("Student exercise: calculate the population step for each time point")
########################################################################
# Calculate the population step
p[k+1] = ...
# Visualize
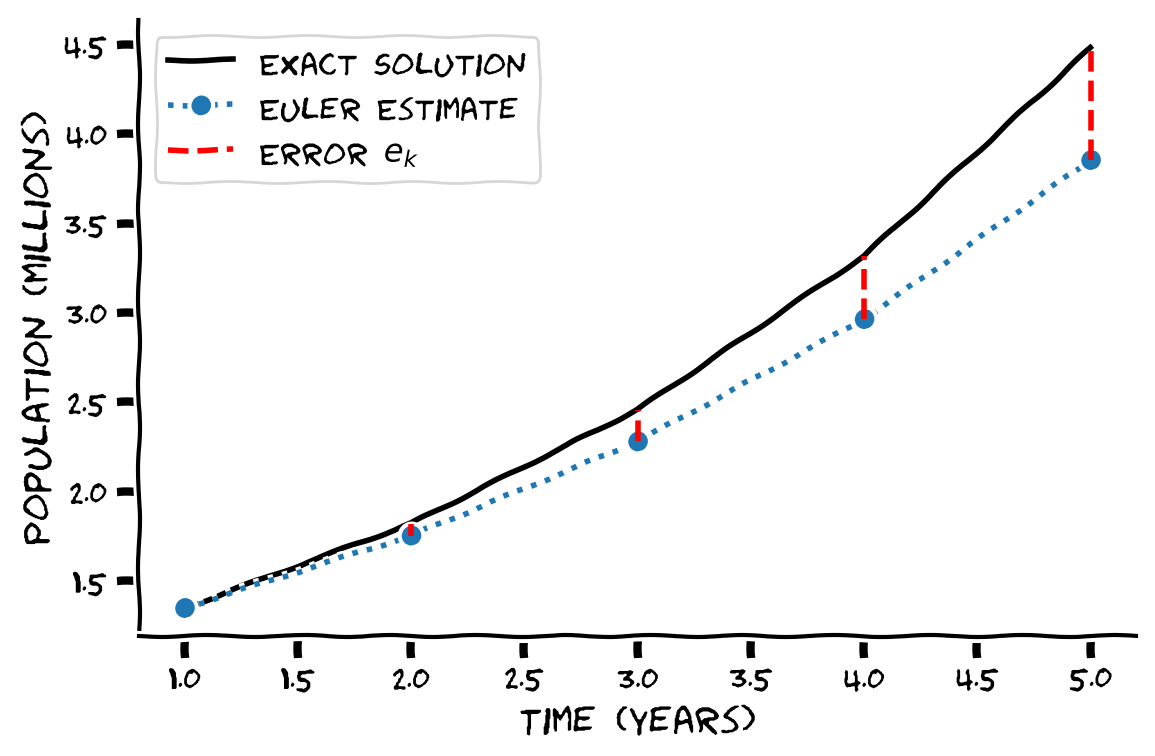
visualize_population_approx(t, p)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Step_step_step_Exercise")
The error is smaller for 4-time steps than taking one large time step from 1 to 5 but does note that the error is increasing for each step. This is known as global error so the further in time you want to predict, the larger the error.
You can read the theorems here.
Section 2: Euler method for the leaky integrate and fire#
Estimated timing to here from start of tutorial: 26 min
Video 3: Leaky integrate and fire#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Leaky_integrate_and_fire_Video")
Click here for text recap of video
The Leaky Integrate and Fire (LIF) differential equation is:
where \(\tau_m\) is the time constant, \(V\) is the membrane potential, \(E_L\) is the resting potential, \(R_m\) is leak resistance and \(I(t)\) is the external input current.
The solution of the LIF can be estimated by applying the Euler method to give the difference equation:
where \(V[k]\) is the estimate of the membrane potential at time point \(t[k]\). Re-arranging the equation such that all the known terms are on the right gives:
where \(\color{red}{V[k+1]}\) is the unknown membrane potential at \(t[k+1]\), \(\color{green}{V[k]} \) is known membrane potential, \(\color{blue}{E_L}\), \(\color{blue}{R_m}\) and \(\color{blue}{\tau_m}\) are known parameters, \(\color{blue}{\Delta t}\) is a chosen time-step and \(I(t_k)\) is a function for an external input current.
Coding Exercise 2: LIF and Euler#
Code the difference equation for the LIF:
with the given parameters set as:
V_reset = -75,E_L = -75,tau_m = 10,R_m = 10.
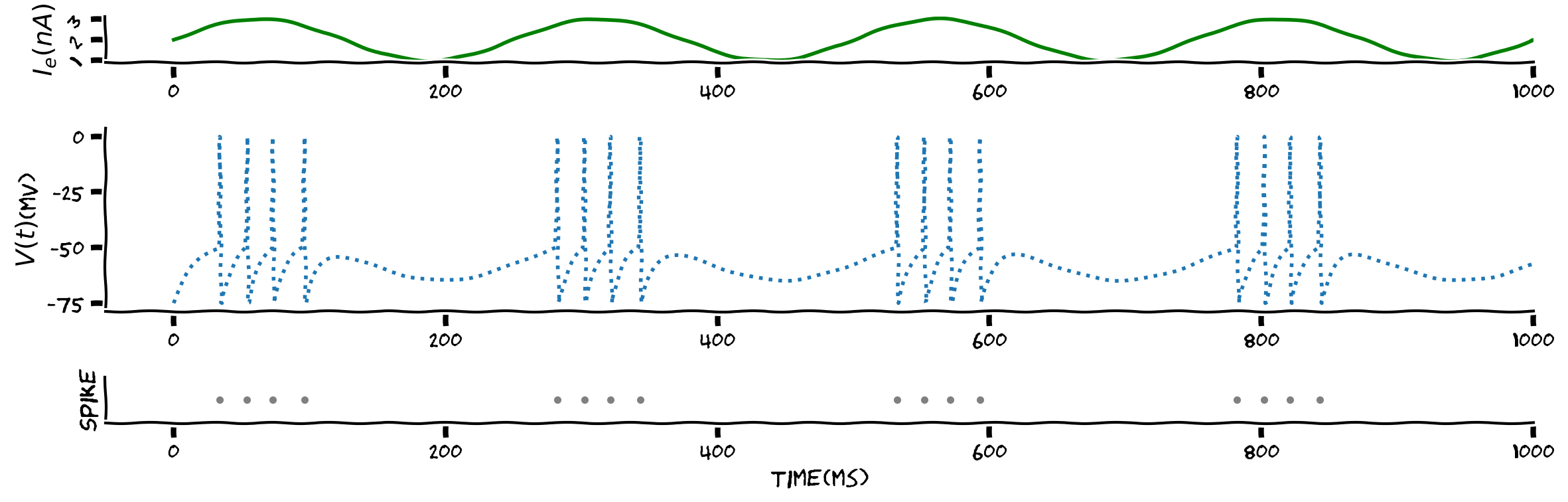
We will then visualize the result. The figure has three panels:
the top panel is the sinusoidal input, \(I\),
the middle panel is the estimate membrane potential \(V_k\). To illustrate a spike, \(V_k\) is set to \(0\) and then reset,
the bottom panel is the raster plot with each dot indicating a spike.
def Euler_Integrate_and_Fire(I, time, dt):
"""
Args:
I: Input
time: time
dt: time-step
Returns:
Spike: Spike count
Spike_time: Spike times
V: membrane potential esitmated by the Euler method
"""
Spike = 0
tau_m = 10
R_m = 10
t_isi = 0
V_reset = E_L = -75
n = len(time)
V = V_reset * np.ones(n)
V_th = -50
Spike_time = []
for k in range(n-1):
#######################################################################
## TODO for students: calculate the estimate solution of V at t[i+1]
## Complete line of codes for dV and remove
## Run the code in Section 5.1 or 5.2 to see the output!
raise NotImplementedError("Student exercise: calculate the estimate solution of V at t[i+1]")
########################################################################
dV = ...
V[k+1] = V[k] + dt*dV
# Discontinuity for Spike
if V[k] > V_th:
V[k] = 0
V[k+1] = V_reset
t_isi = time[k]
Spike = Spike + 1
Spike_time = np.append(Spike_time, time[k])
return Spike, Spike_time, V
# Set up time step and current
dt = 1
t = np.arange(0, 1000, dt)
I = np.sin(4 * 2 * np.pi * t/1000) + 2
# Model integrate and fire neuron
Spike, Spike_time, V = Euler_Integrate_and_Fire(I, t, dt)
# Visualize
plot_IF(t, V,I,Spike_time)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_LIF_and_Euler_Exercise")
As electrophysiologists normally listen to spikes when conducting experiments, listen to the music of the LIF neuron below. Note: this does not work on all browsers so just move on if you can’t hear the audio.
Execute this cell to visualize the LIF for sinusoidal input
Show code cell source
# @markdown *Execute this cell to visualize the LIF for sinusoidal input*
dt = 1
t = np.arange(0, 1000, dt)
I = np.sin(4 * 2 * np.pi * t/1000) + 2
Spike, Spike_time, V = Euler_Integrate_and_Fire(I, t, dt)
plot_IF(t, V,I,Spike_time)
plt.show()
ipd.Audio(V, rate=1000/dt)
Section 3: Systems of differential equations#
Estimated timing to here from start of tutorial: 34 min
Video 4: Systems of differential equations#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Systems_of_differential_equations_Video")
Section 3.1: Using Euler to approximate a simple system#
Estimated timing to here from start of tutorial: 40 min
Click here for text recap of relevant part of video
To get to grips with solving a system of differential equations using the Euler method, we will simplify the Wilson Cowan model, a set of equations that will be explored in more detail in the Dynamical Systems day. Looking at systems of differential equations will also allow us to introduce the concept of a phase-plane plot which is a method of investigating how different processes interact.
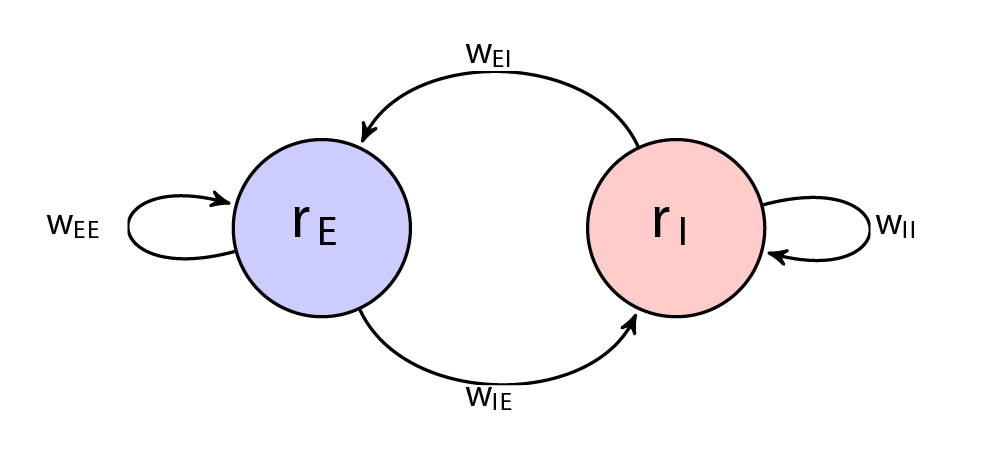
In the previous section we looked at the LIF model for a single neuron. We now model a collection of neurons using a differential equation which describes the firing rate of a population of neurons. We will model the firing rate \(r\) of two types of populations of neurons which interact, the excitation population firing rate \(r_E\) and inhibition population firing rate \(r_I\). These firing rates of neurons regulate each other by weighted connections \(w\). The directed graph below illustrates this.
Our system of differential equations is a linear version of the Wilson Cowan model. Consider the equations,
\(r_E(t)\) represents the average activation (or firing rate) of the excitatory population at time \(t\), and \(r_I(t)\) the activation (or firing rate) of the inhibitory population. The parameters \(\tau_E\) and \(\tau_I\) control the timescales of the dynamics of each population. Connection strengths are given by: \(w_{EE}\) (E \(\rightarrow\) E), \(w_{EI}\) (I \(\rightarrow\) E), \(w_{IE}\) (E \(\rightarrow\) I), and \(w_{II}\) (I \(\rightarrow\) I). The terms \(w_{EI}\) and \(w_{IE}\) represent connections from inhibitory to excitatory population and vice versa, respectively.
To start we will further simplify the linear system of equations by setting \(w_{EE}\) and \(w_{II}\) to zero, we now have the equations
where \(\tau_E=100\) and \(\tau_I=120\), no internal connection \(w_{EE}=w_{II}=0\), and \(w_{EI}=-1\) and \(w_{IE}=1\), with the initial conditions
The solution can be approximated using the Euler method such that we have the difference equations:
where \(r_E[k]\) and \(r_I[k]\) are the numerical estimates of the firing rate of the excitation population \(r_E(t[k])\) and inhibition population \(r_I(t[k])\) and \(\Delta t\) is the time-step.
Re-arranging the equation such that all the known terms are on the right gives:
where \(\color{red}{r_E[k+1]}\) and \(\color{red}{r_I[k+1]}\) are unknown, \(\color{green}{r_E[k]} \) and \(\color{green}{r_I[k]} \) are known, \(\color{blue}{w_{EI}}=-1\), \(\color{blue}{w_{IE}}=1\) and \(\color{blue}{\tau_E}=100ms\) and \(\color{blue}{\tau_I}=120ms\) are known parameters and \(\color{blue}{\Delta t}=0.01ms\) is a chosen time-step.
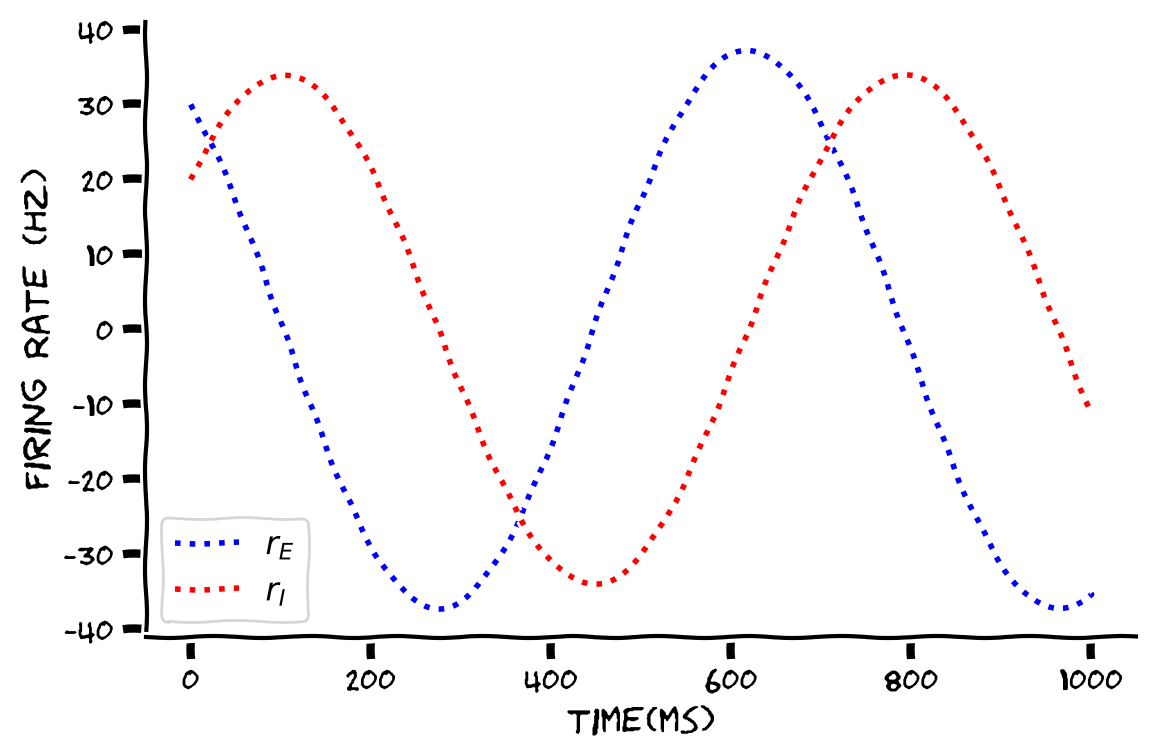
Coding Exercise 3.1: Euler on a Simple System#
Our difference equations are:
where \(\color{red}{r_E[k+1]}\) and \(\color{red}{r_I[k+1]}\) are unknown, \(\color{green}{r_E[k]} \) and \(\color{green}{r_I[k]} \) are known, \(\color{blue}{w_{EI}}=-1\), \(\color{blue}{w_{IE}}=1\) and \(\color{blue}{\tau_E}=100ms\) and \(\color{blue}{\tau_I}=120ms\) are known parameters and \(\color{blue}{\Delta t}=0.01ms\) is a chosen time-step. Code the difference equations to estimate \(r_{E}\) and \(r_{I}\).
Note that the equations have to estimated in the same for loop as they depend on each other.
def Euler_Simple_Linear_System(t, dt):
"""
Args:
time: time
dt : time-step
Returns:
r_E : Excitation Firing Rate
r_I : Inhibition Firing Rate
"""
# Set up parameters
tau_E = 100
tau_I = 120
n = len(t)
r_I = np.zeros(n)
r_I[0] = 20
r_E = np.zeros(n)
r_E[0] = 30
#######################################################################
## TODO for students: calculate the estimate solutions of r_E and r_I at t[i+1]
## Complete line of codes for dr_E and dr_I and remove
raise NotImplementedError("Student exercise: calculate the estimate solutions of r_E and r_I at t[i+1]")
########################################################################
# Loop over time steps
for k in range(n-1):
# Estimate r_e
dr_E = ...
r_E[k+1] = r_E[k] + dt*dr_E
# Estimate r_i
dr_I = ...
r_I[k+1] = r_I[k] + dt*dr_I
return r_E, r_I
# Set up dt, t
dt = 0.1 # time-step
t = np.arange(0, 1000, dt)
# Run Euler method
r_E, r_I = Euler_Simple_Linear_System(t, dt)
# Visualize
plot_rErI(t, r_E, r_I)
Example output:
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Euler_on_a_simple_system_Exercise")
Think! 3.1: Simple Euler solution to the Wilson Cowan model#
Is the simulation biologically plausible?
What is the effect of combined excitation and inhibition?
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Simple_Euler_solution_to_the_Wilson_Cowan_model_Discussion")
Section 3.2: Phase Plane Plot and Nullcline#
Estimated timing to here from start of tutorial: 50 min
Click here for text recap of relevant part of video
When there are two differential equations describing the interaction of two processes like excitation \(r_{E}\) and inhibition \(r_{I}\) that are dependent on each other they can be plotted as a function of each other, which is known as a phase plane plot. The phase plane plot can give insight give insight into the state of the system but more about that later in Neuromatch Academy.
In the animated figure below, the panel of the left shows the excitation firing rate \(r_E\) and the inhibition firing rate \(r_I\) as a function of time. The panel on the right hand side is the phase plane plot which shows the inhibition firing rate \(r_I\) as a function of excitation firing rate \(r_E\).
An addition to the phase plane plot are the “nullcline”. These lines plot when the rate of change \(\frac{d}{dt}\) of the variables is equal to \(0\). We saw a variation of this for a single differential equation in the differential equation tutorial.
As we have two differential equations we set \(\frac{dr_E}{dt}=0\) and \(\frac{dr_I}{dt}=0\) which gives the equations,
these are a unique example as they are a vertical and horizontal line. Where the lines cross is the stable point which the \(r_E(t)\) excitatory population and \(r_I(t)\) the inhibitory population orbit around.
Think! 6.1: Discuss the Plots#
Which representation is more intuitive (and useful), the time plot or the phase plane plot?
Why do we only see one circle?
What do the quadrants represent?
Execute the code to plot the solution to the system
Show code cell source
# @markdown Execute the code to plot the solution to the system
plot_rErI_Simple(t, r_E, r_I)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Discuss_the_Plots_Discussion")
Section 3.3: Adding internal connections#
Estimated timing to here from start of tutorial: 57 min
Building up the equations in the previous section we re-introduce internal connections \(w_{EE}\), \(w_{II}\). The two coupled differential equations, each representing the dynamics of the excitatory or inhibitory population are now:
where \(\tau_E=100\) and \(\tau_I=120\), \(w_{EE}=1\) and \(w_{II}=-1\), and \(w_{EI}=-5\) and \(w_{IE}=0.6\), with the initial conditions
The solutions can be approximated using the Euler method such that the equations become:
where \(r_E[k]\) and \(r_I[k]\) are the numerical estimates of the firing rate of the excitation population \(r_E(t_k)\) and inhibition population \(r_I(t_K)\) and \(\Delta t\) is the time-step.
Re-arranging the equation such that all the known terms are on the right gives:
where \(\color{red}{rE_{k+1}}\) and \(\color{red}{rI_{k+1}}\) are unknown, \(\color{green}{rE_{k}} \) and \(\color{green}{rI_{k}} \) are known, \(\color{blue}{w_{EI}}=-1\), \(\color{blue}{w_{IE}}=1\), \(\color{blue}{w_{EE}}=1\), \(\color{blue}{w_{II}}=-1\) and \(\color{blue}{\tau_E}=100\) and \(\color{blue}{\tau_I}=120\) are known parameters and \(\color{blue}{\Delta t}=0.1\) is a chosen time-step.
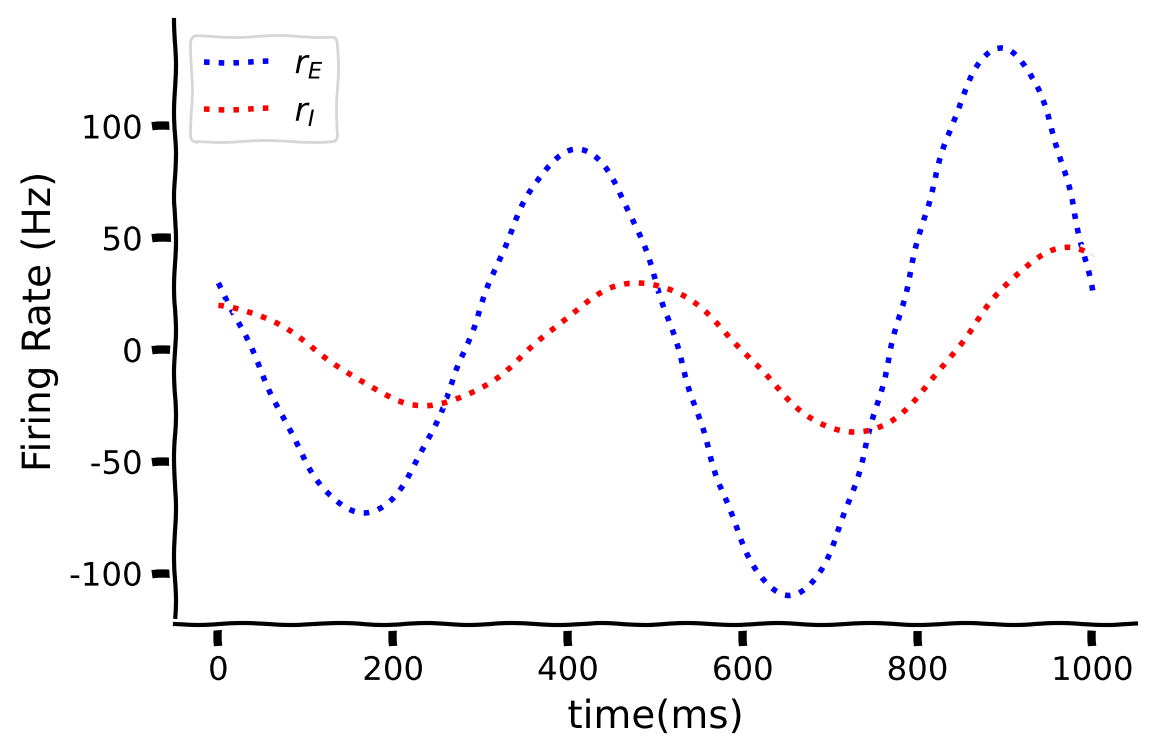
Think! 3.3: Oscillations#
The code below implements and visualizes the linear Wilson-Cowan model.
What will happen to the oscillations if the time period is extended?
How would you control or predict the oscillations?
Execute this cell to visualize the Linear Willson-Cowan
Show code cell source
# @markdown *Execute this cell to visualize the Linear Willson-Cowan*
def Euler_Linear_System_Matrix(t, dt, w_EE=1):
"""
Args:
time: time
dt: time-step
w_EE: Excitation to excitation weight
Returns:
r_E: Excitation Firing Rate
r_I: Inhibition Firing Rate
N_Er: Nullclines for drE/dt=0
N_Ir: Nullclines for drI/dt=0
"""
tau_E = 100
tau_I = 120
n = len(t)
r_I = 20*np.ones(n)
r_E = 30*np.ones(n)
w_EI = -5
w_IE = 0.6
w_II = -1
for k in range(n-1):
# Calculate the derivatives of the E and I populations
drE = (w_EI*r_I[k] + w_EE*r_E[k]) / tau_E
r_E[k+1] = r_E[k] + dt*drE
drI = (w_II*r_I[k] + w_IE*r_E[k]) / tau_I
r_I[k+1] = r_I[k] + dt*drI
N_Er = -w_EE / w_EI*r_E
N_Ir = -w_IE / w_II*r_E
return r_E, r_I, N_Er, N_Ir
dt = 0.1 # time-step
t = np.arange(0, 1000, dt)
r_E, r_I, _, _ = Euler_Linear_System_Matrix(t, dt)
plot_rErI(t, r_E, r_I)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Oscillations_Discussion")
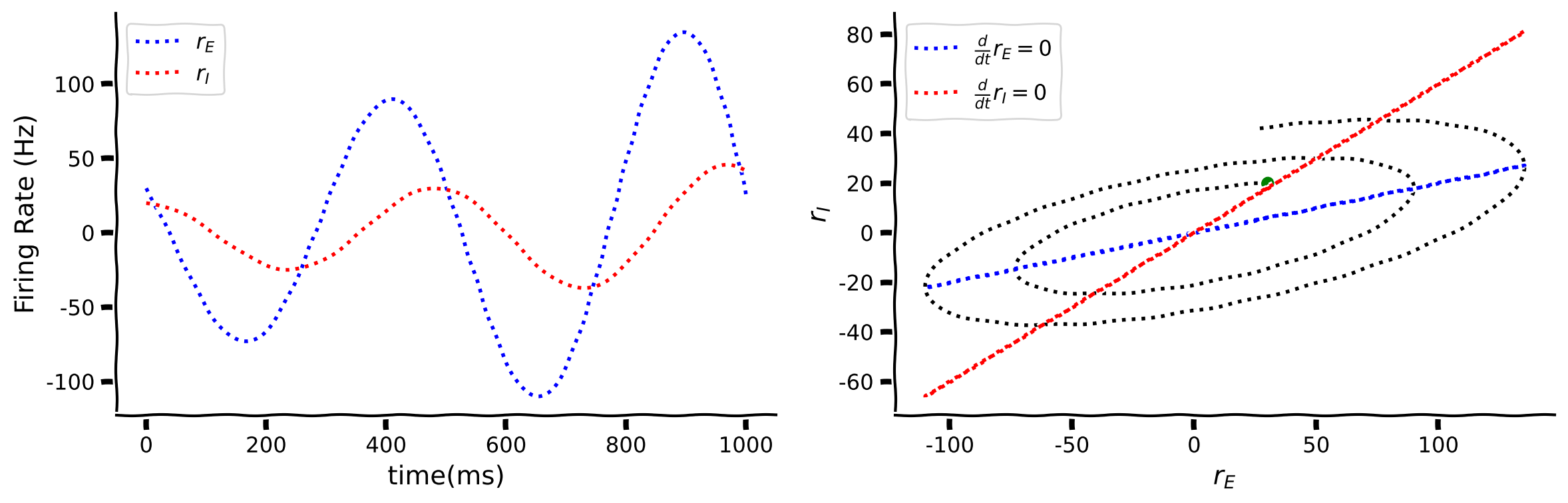
Section 3.4 Phase Plane and Nullclines Part 2#
Estimated timing to here from start of tutorial: 62 min
Like before, we have two differential equations so we can plot the results on a phase plane. We can also calculate the Nullclines when we set \(\frac{dr_E}{dt}=0\) and \(\frac{dr_I}{dt}=0\) which gives,
re-arranging as two lines
which crosses at the stable point.
The panel on the left shows excitation firing rate \(r_E\) and inhibition firing rate \(r_I\) as a function of time. On the right side the phase plane plot shows inhibition firing rate \(r_I\) as a function of excitation firing rate \(r_E\) with the Nullclines for \(\frac{dr_E}{dt}=0\) and \(\frac{dr_I}{dt}=0.\)
Run this cell to visualize the phase plane
Show code cell source
# @markdown *Run this cell to visualize the phase plane*
dt = 0.1 # time-step
t = np.arange(0, 1000, dt)
r_E, r_I, N_Er, N_Ir = Euler_Linear_System_Matrix(t, dt)
plot_rErI_Matrix(t, r_E, r_I, N_Er, N_Ir)
Interactive Demo 3.4: A small change changes everything#
We will illustrate that even changing one parameter in a system of differential equations can have a large impact on the solutions of the excitation firing rate \(r_E\) and inhibition firing rate \(r_I\). Interact with the widget below to change the size of \(w_{EE}\).
Take note of:
How the solution changes for positive and negative of \(w_{EE}\). Pay close attention to the axis.
How would you maintain a stable oscillation.
Make sure you execute this cell to enable the widget!
Show code cell source
# @markdown Make sure you execute this cell to enable the widget!
my_layout.width = '450px'
@widgets.interact(
w_EE=widgets.FloatSlider(1, min=-1., max=2., step=.1,
layout=my_layout)
)
def Pop_widget(w_EE):
dt = 0.1 # time-step
t = np.arange(0,1000,dt)
r_E, r_I, N_Er, N_Ir = Euler_Linear_System_Matrix(t, dt, w_EE)
plot_rErI_Matrix(t, r_E, r_I, N_Er, N_Ir)
plt.show()
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Small_change_changes_everything_Interactive_Demo")
Summary#
Estimated timing of tutorial: 70 minutes
Video 5: Summary#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Summary_Video")
Using the formula for the slope of a line, the solution of the differential equation can be estimated with reasonable accuracy. This will be much more relevant when dealing with more complicated (non-linear) differential equations where there is no known exact solution.
Links to Neuromatch Computational Neuroscience Days#
Differential equations turn up on a number of different Neuromatch days:
The LIF model is discussed in more detail in Model Types and Biological Neuron Models.
Drift Diffusion model, which is a differential equation for decision making, is discussed in Linear Systems.
Phase-plane plots are discussed in Linear Systems and Dynamic Networks.
The Wilson-Cowan model is discussed in Dynamic Networks.
References#
Lotka, A. L, (1920) Analytical note on certain rhythmic relations inorganic systems.Proceedings of the National Academy of Sciences, 6(7):410–415,1920. doi: 10.1073/pnas.6.7.410
Brunel N, van Rossum MC. Lapicque’s 1907 paper: from frogs to integrate-and-fire. Biol Cybern. 2007 Dec;97(5-6):337-9. doi: 10.1007/s00422-007-0190-0. Epub 2007 Oct 30. PMID: 17968583.
Bibliography#
Dayan, P., & Abbott, L. F. (2001). Theoretical neuroscience: computational and mathematical modeling of neural systems. Computational Neuroscience Series.
Strogatz, S. (2014). Nonlinear dynamics and chaos: with applications to physics, biology, chemistry, and engineering (studies in nonlinearity), Westview Press; 2nd edition
Supplemental Popular Reading List#
Lindsay, G. (2021). Models of the Mind: How Physics, Engineering and Mathematics Have Shaped Our Understanding of the Brain. Bloomsbury Publishing.
Strogatz, S. (2004). Sync: The emerging science of spontaneous order. Penguin UK.
Popular Podcast#
Strogatz, S. (Host). (2020), Joy of X https://www.quantamagazine.org/tag/the-joy-of-x/ Quanta Magazine
Bonus#
Bonus Section 1: The 4th Order Runge-Kutta method#
Another popular numerical method to estimate the solution of differential equations of the general form:
is the 4th Order Runge Kutta:
for \(k=0,1,\cdots,n-1\), which is more accurate than the Euler method.
Given the population differential equation
the 4th Runge Kutta difference equation is
for \(k=0,1,\cdots 4\) to estimate the population for \(\Delta t=0.5\).
The code is implemented below. Note how much more accurate the 4th Order Runge Kutta (yellow) is compared to the Euler Method (blue). The 4th order Runge Kutta is of order 4 which means that if you half the time-step \(\Delta t\) the error decreases by a factor of \(\Delta t^4\).
Show code cell source
# @markdown *Execute this cell to show the difference between the Runge Kutta Method and the Euler Method*
def RK4(dt=0.5):
t=np.arange(1, 5+dt/2, dt)
t_fine=np.arange(1, 5+0.1/2, 0.1)
n = len(t)
p = np.ones(n)
pRK4 = np.ones(n)
p[0] = np.exp(0.3*t[0])
pRK4[0] = np.exp(0.3*t[0])# Initial Condition
with plt.xkcd():
fig = plt.figure(figsize=(6, 4))
plt.plot(t, np.exp(0.3*t), 'k', label='Exact Solution')
for i in range(n-1):
dp = dt*0.3*p[i]
p[i+1] = p[i] + dp # Euler
k1 = 0.3*(pRK4[i])
k2 = 0.3*(pRK4[i] + dt/2*k1)
k3 = 0.3*(pRK4[i] + dt/2*k2)
k4 = 0.3*(pRK4[i] + dt*k3)
pRK4[i+1] = pRK4[i] + dt/6 *(k1 + 2*k2 + 2*k3 + k4)
plt.plot(t_fine, np.exp(0.3*t_fine), label='Exact')
plt.plot(t, p,':ro', label='Euler Estimate')
plt.plot(t, pRK4,':co', label='4th Order Runge Kutta Estimate')
plt.ylabel('Population (millions)')
plt.legend()
plt.xlabel('Time (years)')
plt.show()
# @markdown Make sure you execute this cell to enable the widget!
my_layout.width = '450px'
@widgets.interact(
dt=widgets.FloatSlider(0.5, min=.1, max=4., step=.1,
layout=my_layout)
)
def Pop_widget(dt):
RK4(dt)
Bonus Reference 1: A full course on numerical methods in Python
For a full course on Numerical Methods for differential Equations you can look here.
Bonus Section 2: Neural oscillations are a start toward understanding brain activity rather than the end#
The differential equations we have discussed above are all to simulate neuronal processes. Another way differential equations can be used is to motivate experimental findings.
Many experimental and neurophysiological studies have investigated whether the brain oscillates and/or entrees to a stimulus. An issue with these studies is that there is no consistent definition of what constitutes an oscillation. Right now, it is a bit of I know one when I see one problem.
In an essay from May 2021 in PLoS Biology, Keith Dowling (a past Neuromatch TA) and M. Florencia Assaneo discussed a mathematical way of thinking about what should be expected experimentally when studying oscillations. The essay proposes that instead of thinking about the brain, we should look at this question from the mathematical side to motivate what can be defined as an oscillation.
To do this, they used Stuart–Landau equations, which is a system of differential equations
where \(s\) is input to the system, and \(\lambda\), \(\omega\) and \(\gamma\) are parameters.
The Stuart–Landau equations are a well-described system of non-linear differential equations that generate oscillations. For their purpose, Dowling and Assaneo used the equations to motivate what experimenters should expect when conducting experiments looking for oscillations. In their paper, using the Stuart–Landau equations, they outline
“What is an oscillator?”
“What an oscillator is not.”
“Not all that oscillates is an oscillator.”
“Not all oscillators are alike.”
The Euler form of the Stuart–Landau system of equations is:
with \( \Delta t=0.1/1000\) ms.
Helper functions#
Show code cell source
# @title Helper functions
def plot_Stuart_Landa(t, x, y, s):
"""
Args:
t : time
x : x
y : y
s : input
Returns:
figure with two panels
top panel: Input as a function of time
bottom panel: x
"""
with plt.xkcd():
fig = plt.figure(figsize=(14, 4))
gs = gridspec.GridSpec(2, 2, height_ratios=[1, 4], width_ratios=[4, 1])
# PLOT OF INPUT
plt.subplot(gs[0])
plt.ylabel(r'$s$')
plt.plot(t, s, 'g')
#plt.ylim((2,4))
# PLOT OF ACTIVITY
plt.subplot(gs[2])
plt.plot(t ,x)
plt.ylabel(r'x')
plt.xlabel(r't')
plt.subplot(gs[3])
plt.plot(x,y)
plt.plot(x[0], y[0],'go')
plt.xlabel(r'x')
plt.ylabel(r'y')
plt.show()
def Euler_Stuart_Landau(s,time,dt,lamba=0.1,gamma=1,k=25):
"""
Args:
I: Input
time: time
dt: time-step
"""
n = len(time)
omega = 4 * 2*np.pi
x = np.zeros(n)
y = np.zeros(n)
x[0] = 1
y[0] = 1
for i in range(n-1):
dx = lamba*x[i] - omega*y[i] - gamma*(x[i]*x[i] + y[i]*y[i])*x[i] + k*s[i]
x[i+1] = x[i] + dt*dx
dy = lamba*y[i] + omega*x[i] - gamma*(x[i]*x[i] + y[i]*y[i])*y[i]
y[i+1] = y[i] + dt*dy
return x, y
Bonus 2.1: What is an Oscillator?#
Doelling & Assaneo (2021), using the Stuart–Landau system, show different possible states of an oscillator by manipulating the \(\lambda\) term in the equation.
From the paper:
This qualitative change in behavior takes place at \(\lambda = 0\). For \(\lambda < 0\), the system decays to a stable equilibrium, while for \(\lambda > 0\), it keeps oscillating.
This illustrates that oscillations do not have to maintain all the time, so experimentally we should not expect perfectly maintained oscillations. We see this all the time in \(\alpha\) band oscillations in EEG the oscillations come and go.
Interactive Demo Bonus 2.1: Oscillator#
The plot below shows the estimated solution of the Stuart–Landau system with a base frequency \(\omega\) set to \(4\times 2\pi\), \(\gamma=1\) and \(k=25\) over 3 seconds. The input to the system \(s(t)\) is plotted in the top panel, \(x\) as a function of time in the the bottom panel and on the right the phase plane plot of \(x\) and \(y\). You can manipulate \(\lambda\) to see how the oscillations change.
Make sure you execute this cell to enable the widget!
Show code cell source
# @markdown Make sure you execute this cell to enable the widget!
dt=0.1/1000
t=np.arange(0, 3, dt)
my_layout.width = '450px'
@widgets.interact(
lamda=widgets.FloatSlider(1, min=-1., max=5., step=0.5,
layout=my_layout)
)
def Pop_widget(lamda):
s=np.zeros(len(t))
x,y=Euler_Stuart_Landau(s,t,dt,lamda)
plot_Stuart_Landa(t, x, y, s)
plt.show()
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Oscillator_Bonus_Interactive_Demo")
Bonus 2.2 : Not all oscillators are alike#
Interactive Demo Bonus 2: Stuart-Landau System#
The plot below shows the estimated solution of the Stuart–Landau system with a base frequency of 4Hz by setting \(\omega\) to \(4\times 2\pi\), \(\lambda=1\), \(\gamma=1\) and \(k=50\) over 3 seconds the input to the system \(s(t)=\sin(freq 2\pi t) \) in the top panel, \(x\) as a function of time in the bottom panel and on the right the phase plane plot of \(x\) and \(y\).
You can manipulate the frequency \(freq\) of the input to see how the oscillations change, and for frequencies \(freq\) further and further from the base frequency of 4Hz, the oscillations break down.
This shows that if you have an oscillating input into an oscillator, it does not have to respond by oscillating about could even break down. Hence the frequency of the input oscillation is important to the system. So if you flash something at 50Hz, for example, the visual system might not follow the signal, but that does not mean the visual system is not an oscillator. It might just be the wrong frequency.
Make sure you execute this cell to enable the widget!
Show code cell source
# @markdown Make sure you execute this cell to enable the widget!
dt=0.1/1000
t=np.arange(0, 3, dt)
my_layout.width = '450px'
@widgets.interact(
freq=widgets.FloatSlider(4, min=0.5, max=10., step=0.5,
layout=my_layout)
)
def Pop_widget(freq):
s = np.sin(freq * 2*np.pi * t)
x, y = Euler_Stuart_Landau(s, t, dt, lamba=1, gamma=.1, k=50)
plot_Stuart_Landa(t, x, y, s)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Stuart_Landau_System_Bonus_Interactive_Demo")
Bonus Reference 2:
Doelling, K. B., & Assaneo, M. F. (2021). Neural oscillations are a start toward understanding brain activity rather than the end. PLoS biology, 19(5), e3001234. doi: 10.1371/journal.pbio.3001234